本文将分享Android5,camera2仅使用闪光灯的详细内容,并且还将对android调用闪光灯进行详尽解释,此外,我们还将为大家带来关于Android7.1Camera2拍照镜像分析、Andro
本文将分享Android 5,camera2仅使用闪光灯的详细内容,并且还将对android调用闪光灯进行详尽解释,此外,我们还将为大家带来关于Android 7.1 Camera2 拍照镜像分析、Android : Camera2/HAL3 框架分析、android Camera2 API使用详解、android camera2 API流程分析的相关知识,希望对你有所帮助。
本文目录一览:- Android 5,camera2仅使用闪光灯(android调用闪光灯)
- Android 7.1 Camera2 拍照镜像分析
- Android : Camera2/HAL3 框架分析
- android Camera2 API使用详解
- android camera2 API流程分析
")
Android 5,camera2仅使用闪光灯(android调用闪光灯)
像手电筒应用程序一样,我只需要将闪光灯与API camera2(Android 5,API级别21)一起使用。但是我发现的所有示例都需要在视图中显示摄像机流
答案1
小编典典https://github.com/pinguo-
yuyidong/Camera2/blob/master/app/src/main/java/us/yydcdut/androidltest/otheractivity/FlashActivity.java
在这里,您无需预览即可打开Flash 。

Android 7.1 Camera2 拍照镜像分析
要求:Camera2 拍照 镜像
主要的想法: 是根据 拍照按钮来跟踪成像照片 最后镜像翻转
Rk3288 PhotoModule 模式
A40i CaptureModule 模式 ,改缩略图 改成像图
====================================================
RK3288 android7.1
====================================================
K:\ZK-Rxxx_7.1_RK3288_Firmware\ZK_RXXX_RK3288_ANDROID7.1\packages\apps\Camera2\src\com\android\camera\PhotoModule.java
1.1.拍照按钮回调 onShutterButtonClick
@Override
public void onShutterButtonClick() {
1.2.找到拍照最后保存照片 saveFinalPhoto 由Matrix 创建矩阵,并水平平移 镜像
--- a/packages/apps/Camera2/src/com/android/camera/PhotoModule.java
+++ b/packages/apps/Camera2/src/com/android/camera/PhotoModule.java
@@ -103,7 +103,7 @@ import java.lang.ref.WeakReference;
import java.util.ArrayList;
import java.util.List;
import java.util.Vector;
-
+import android.graphics.Matrix;
public class PhotoModule
extends CameraModule
@@ -1644,6 +1644,9 @@ public class PhotoModule
void saveFinalPhoto(final byte[] jpegData, NamedEntity name, final ExifInterface exif,
CameraProxy camera) {
+
+ android.util.Log.d("gatsby", "PhotoModule.saveFinalPhoto CameraCaputre");
+
int orientation = Exif.getorientation(exif);
float zoomValue = 1.0f;
@@ -1714,8 +1717,17 @@ public class PhotoModule
exif.setTag(directionRefTag);
exif.setTag(directionTag);
}
+ Bitmap bitmap = CameraUtil.makeBitmap(jpegData, exifWidth*exifheight);
+ Matrix m = new Matrix();
+ m.postScale(-1, 1);
+ bitmap = Bitmap.createBitmap(bitmap, 0, 0, bitmap.getWidth(), bitmap.getHeight(), m, true);
+ ByteArrayOutputStream baos = new ByteArrayOutputStream();
+ bitmap.compress(Bitmap.CompressFormat.JPEG, 100, baos);
+ byte[] tm_jpegData;
+ tm_jpegData = baos.toByteArray();
+ //gatsby
getServices().getMediaSaver().addImage(
- jpegData, title, date, mLocation, width, height,
+ tm_jpegData, title, date, mLocation, width, height,
orientation, exif, mOnMediaSavedListener);
}
// Animate capture with real jpeg data instead of a preview
A40i android7.1
=====================================================
2021.01.15
======================================================
1.1. 拍照按钮
K:\ZK_A40X_A40i_ANDROID7.1\android\packages\apps\Camera2\src\com\android\camera\CaptureModule.java
@Override
public void onShutterButtonClick() {
if (mCamera == null) {
return;
}
int countDownDuration = mSettingsManager
.getInteger(SettingsManager.ScopE_GLOBAL, Keys.KEY_COUNTDOWN_DURATION);
if (countDownDuration > 0) {
// Start count down.
mAppController.getCameraAppUI().transitionToCancel();
mAppController.getCameraAppUI().hideModeOptions();
mUI.setCountdownFinishedListener(this);
mUI.startCountdown(countDownDuration);
// Will take picture later via listener callback.
} else {
takePictureNow();
}
}
1.2. 拍照
K:\ZK_A40X_A40i_ANDROID7.1\android\packages\apps\Camera2\src\com\android\camera\CaptureModule.java
private void takePictureNow() {
if (mCamera == null) {
Log.i(TAG, "Not taking picture since Camera is closed.");
return;
}
android.util.Log.d("gatsby", "CaptureModule takePictureNow");
CaptureSession session = createAndStartCaptureSession();
int orientation = mAppController.getorientationManager().getDeviceOrientation()
.getdegrees();
// Todo: This should really not use getExternalCacheDir and instead use
// the SessionStorage API. Need to sync with gcam if that's OK.
PhotoCaptureParameters params = new PhotoCaptureParameters(
session.getTitle(), orientation, session.getLocation(),
mContext.getExternalCacheDir(), this, mPictureSaverCallback,
mheadingSensor.getCurrentheading(), mZoomValue, 0);
decorateSessionAtCaptureTime(session);
//gatsby take a pircture
mCamera.takePicture(params, session);
}
1.3
K:\ZK_A40X_A40i_ANDROID7.1\android\packages\apps\Camera2\src\com\android\camera\one\OneCamera.java
/**
* Call this to take a picture.
*
* @param params parameters for taking pictures.
* @param session the capture session for this picture.
*/
public void takePicture(PhotoCaptureParameters params, CaptureSession session);
1.4. 定义PictureTaker接口
K:\ZK_A40X_A40i_ANDROID7.1\android\packages\apps\Camera2\src\com\android\camera\one\v2\photo\PictureTaker.java
public interface PictureTaker {
/**
* @See {@link OneCamera#takePicture}
*/
public void takePicture(OneCamera.PhotoCaptureParameters params, CaptureSession session);
}
1.5. PictureTakerImpl类 实现 PictureTaker接口 重写了takePicture方法,
K:\ZK_A40X_A40i_ANDROID7.1\android\packages\apps\Camera2\src\com\android\camera\one\v2\photo\PictureTakerImpl.java
class PictureTakerImpl implements PictureTaker {
@Override
public void takePicture(OneCamera.PhotoCaptureParameters params, final CaptureSession session) {
android.util.Log.d("gatsby", "PictureTakerImpl takePicture");
OneCamera.PictureCallback pictureCallback = params.callback;
// Wrap the pictureCallback with a thread-safe adapter which guarantees
// that they are always invoked on the main thread.
PictureCallbackAdapter pictureCallbackAdapter =
new PictureCallbackAdapter(pictureCallback, mMainExecutor);
final Updatable<Void> imageExposureCallback =
pictureCallbackAdapter.provideQuickExposeUpdatable();
final ImageSaver imageSaver = mImageSaverBuilder.build(
params.saverCallback,
OrientationManager.DeviceOrientation.from(params.orientation),
session);
//Log future
mCameraCommandExecutor.execute(new PictureTakerCommand(
imageExposureCallback, imageSaver, session));
}
1.6. Executing command
gatsby (13557): Executing command: PictureTakerCommand{command=com.android.camera.one.v2.photo.SimpleImageCaptureCommand@d754686} START
K:\ZK_A40X_A40i_ANDROID7.1\android\packages\apps\Camera2\src\com\android\camera\one\v2\commands\CameraCommandExecutor.java
public Future<?> execute(CameraCommand command) {
if (mClosed) {
return Futures.immediateFuture(null);
}
synchronized (mlock) {
if (mExecutor == null) {
// Create a new executor, if necessary.
mExecutor = mExecutorProvider.get();
}
checkNotNull(mExecutor);
android.util.Log.d("gatsby", "CameraCommandExecutor Future<?> checkNotNull(mExecutor)"+new CommandRunnable(command));
return mExecutor.submit(new CommandRunnable(command));
}
}
1.7. 发送拍照请求 (走到这里断了,研究ing)
https://blog.csdn.net/afei__/article/details/86326991
a.CaptureRequest 表示一个捕捉的请求。根据不同的场景(预览、拍照)创建不同的捕捉请求,并可以配置不同的捕捉属性,如:
预览分辨率,预览目标,对焦模式、曝光模式等等
b.CaptureRequest.Builder TEMPLATE_STILL_CAPTURE : 用于创建一个拍照请求。相机会优先保证高画质而不是高帧率。适用于所有相机设备
K:\ZK_A40X_A40i_ANDROID7.1\android\packages\apps\Camera2\src\com\android\camera\one\v2\photo\SimpleImageCaptureCommand.java
/**
* Sends a request to take a picture and blocks until it completes.
*/
//发送一个拍照请求并阻塞直到它完成
@Override
public void run(Updatable<Void> imageExposureUpdatable, ImageSaver imageSaver) throws
InterruptedException, CameraAccessException, CameraCaptureSessionClosedException,
ResourceAcquisitionFailedException {
try (FrameServer.Session session = mFrameServer.createExclusiveSession();
imagestream imagestream = mImageReader.createStream(1)) {
android.util.Log.d("gatsby", "SimpleImageCaptureCommand run");
UpdatableCountDownLatch<Void> exposureLatch = new UpdatableCountDownLatch<>(1);
RequestBuilder photoRequest = mBuilderFactory.create(CameraDevice
.TEMPLATE_STILL_CAPTURE);
photoRequest.addStream(imagestream);
MetadataFuture MetadataFuture = new MetadataFuture();
photoRequest.addResponseListener(MetadataFuture);
photoRequest.addResponseListener(forFrameExposure(imageExposureUpdatable));
photoRequest.addResponseListener(forFrameExposure(exposureLatch));
session.submitRequest(Arrays.asList(photoRequest.build()),
FrameServer.RequestType.NON_REPEATING);
// Release the FrameServer session (allowing subsequent camera
// operations to occur) as soon as the image is exposed.
exposureLatch.await();
session.close();
ImageProxy image = imagestream.getNext();
//addFullSizeImage 时间戳 拍照尺寸
imageSaver.addFullSizeImage(image, MetadataFuture.getMetadata());
} catch (BufferQueue.BufferQueueClosedException e) {
// If we get here, the request was submitted, but the image
// never arrived.
// Todo Log failure and notify the caller
} finally {
imageSaver.close();
}
}
1.7.1 获取照片 时间戳、尺寸
01-01 20:16:33.927 3321 3882 D gatsby : MostRecentimageSaver addFullSizeImage333->Metadataimage{timestamp=994912780557, width=1280, height=960}
@Override
public void addFullSizeImage(ImageProxy imageProxy,
ListenableFuture<TotalCaptureResultProxy> Metadata) {
mFullSizeImages.put(imageProxy.getTimestamp(), new Metadataimage(imageProxy, Metadata));
cloSEOlderImages();
}
1.8.重新回到 PictureTakerImpl 这里来 ,JpegImageBackendImageSaver.java 缩略图
final ImageSaver imageSaver = mImageSaverBuilder.build(
params.saverCallback,
OrientationManager.DeviceOrientation.from(params.orientation),
session);
K:\ZK_A40X_A40i_ANDROID7.1\android\packages\apps\Camera2\src\com\android\camera\one\v2\imagesaver\JpegImageBackendImageSaver.java
public class JpegImageBackendImageSaver implements ImageSaver.Builder {
@Override
public void onResultCompressed(TaskImageContainer.TaskInfo task,
TaskImageContainer.CompressedPayload payload) {
if (task.destination == TaskImageContainer.TaskInfo.Destination.FINAL_IMAGE) {
// Just start the thumbnail Now, since there's no earlier event.
// Downsample and convert the JPEG payload to a reasonably-sized
// Bitmap
BitmapFactory.Options options = new BitmapFactory.Options();
options.inSampleSize = JPEG_DOWNSAMPLE_FOR_FAST_INDICATOR;
//gatsby payload.data 获得data
final Bitmap bitmap = BitmapFactory.decodeByteArray(payload.data, 0,
payload.data.length, options);
// If the rotation is implemented as an EXIF flag, we need to
// pass this information onto the UI call, since the rotation is
// NOT applied to the bitmap directly.
int rotation = Exif.getorientation(payload.data);
mSession.updateCaptureIndicatorThumbnail(bitmap, rotation);
// Send image to remote devices
mPictureSaverCallback.onRemoteThumbnailAvailable(payload.data);
}

Android : Camera2/HAL3 框架分析
一、Android O 上的 Treble 机制:
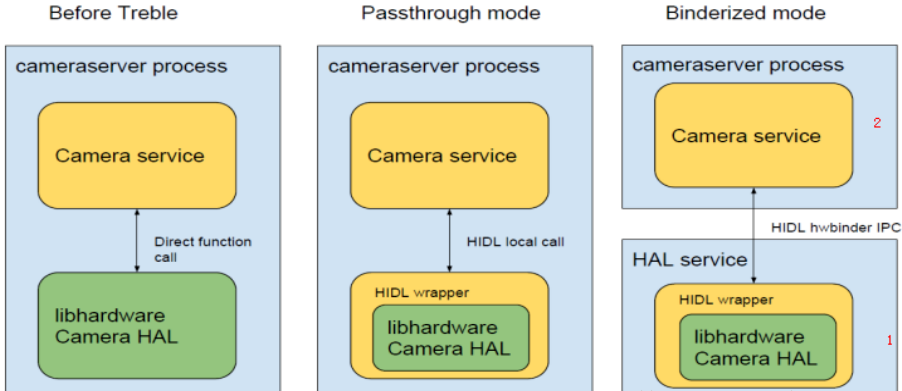
在 Android O 中,系统启动时,会启动一个 CameraProvider 服务,它是从 cameraserver 进程中分离出来,作为一个独立进程 android.hardware.camera.provider@2.4-service 用来控制 camera HAL,cameraserver 通过 HIDL 机制于 camera provider 进行通信。HIDL 源自于 Android O 版本加入的 Treble 机制,它的主要功能是将 service 与 HAL 隔离,以方便 HAL 部分进行独立升级,类似于 APP 与 Framework 之间的 Binder 通信机制,通过引入一个进程间通信机制而针对不同层级进行解耦(从 Local call 变成了 Remote call)。如下图:
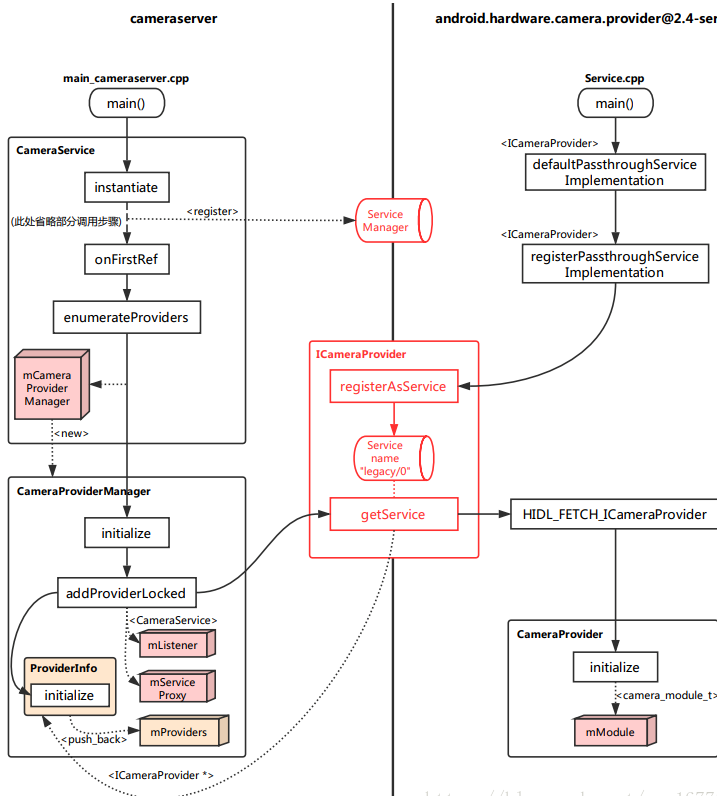
cameraserver 与 provider 这两个进程启动、初始化的调用逻辑,如下图:
二、Camera HAL3 的框架更新:
- Application framework:用于给 APP 提供访问 hardware 的 Camera API2,通过 binder 来访问 camera service。
- AIDL: 基于 Binder 实现的一个用于让 App fw 代码访问 natice fw 代码的接口。其实现存在于下述路径:frameworks/av/camera/aidl/android/hardware。其中:
(1) ICameraService 是相机服务的接口。用于请求连接、添加监听等。
(2) ICameraDeviceUser 是已打开的特定相机设备的接口。应用框架可通过它访问具体设备。
(3) ICameraServiceListener 和 ICameraDeviceCallbacks 分别是从 CameraService 和 CameraDevice 到应用框架的回调。
- Natice framework:frameworks/av/。提供了 ICameraService、ICameraDeviceUser、ICameraDeviceCallbacks、ICameraServiceListener 等 aidl 接口的实现。以及 camera server 的 main 函数。
- Binder IPC interface:提供进程间通信的接口,APP 和 CameraService 的通信、CameraService 和 HAL 的通信。其中,AIDL、HIDL 都是基于 Binder 实现的。
- Camera Service:frameworks/av/services/camera/。同 APP、HAL 交互的服务,起到了承上启下的作用。
- HAL:Google 的 HAL 定义了可以让 Camera Service 访问的标准接口。对于供应商而言,必须要实现这些接口。
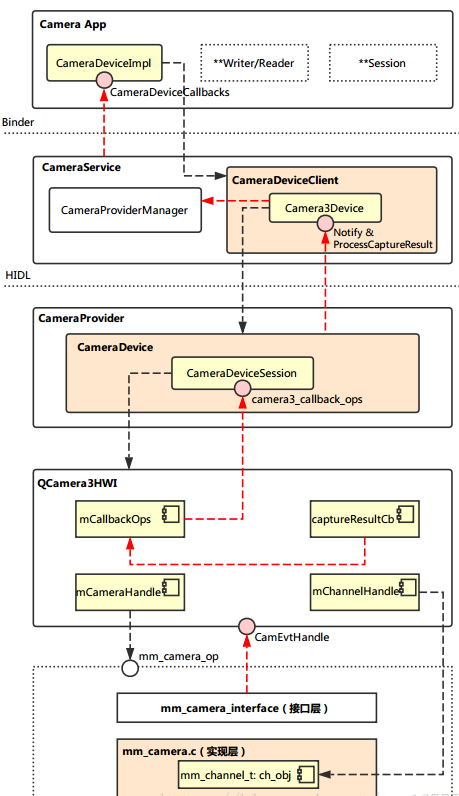
1.Camera HAL3 构建连路的过程,如下图(红色虚线是上行路线,黑色虚线则是下行路线):
2. 从 App 到 CameraService 的调用流程
从 Application 连接到 CameraService,这涉及到 Android 架构中的三个层次:App 层,Framework 层,Runtime 层。其中,App 层直接调用 Framework 层所封装的方法,而 Framework 层需要通过 Binder 远程调用 Runtime 中 CameraService 的函数。
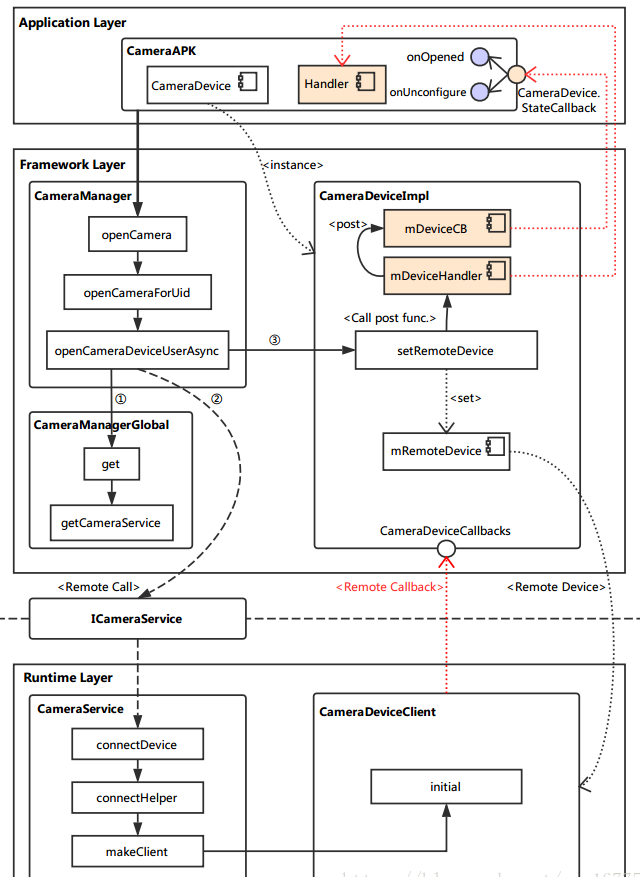
这一部分主要的函数调用逻辑如下图所示:
在 App 中,需要调用打开相机的 API 如下:
- CameraCharacteristics:描述摄像头的各种特性,我们可以通过 CameraManager 的 getCameraCharacteristics (@NonNull String cameraId) 方法来获取。
- CameraDevice:描述系统摄像头,类似于早期的 Camera。
- CameraCaptureSession:Session 类,当需要拍照、预览等功能时,需要先创建该类的实例,然后通过该实例里的方法进行控制(例如:拍照 capture ())。
- CaptureRequest:描述了一次操作请求,拍照、预览等操作都需要先传入 CaptureRequest 参数,具体的参数控制也是通过 CameraRequest 的成员变量来设置。
- CaptureResult:描述拍照完成后的结果。
例如打开 camera 的 java 代码:
mCameraManager.openCamera(currentCameraId, stateCallback, backgroundHandler);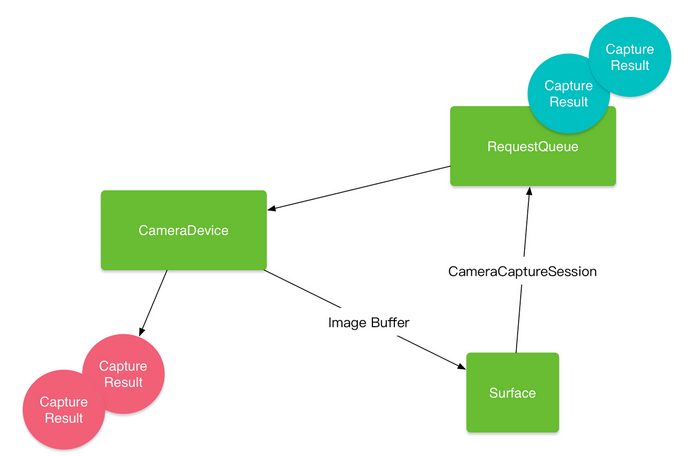
(1)Framework CameraManager :/frameworks/base/core/java/android/hardware/camera2/CameraManager.java
最初的入口就是 CameraManager 的 openCamera 方法,但通过代码可以看到,它仅仅是调用了 openCameraForUid 方法。
@RequiresPermission(android.Manifest.permission.CAMERA)
public void openCamera(@NonNull String cameraId,
@NonNull final CameraDevice.StateCallback callback, @Nullable Handler handler)
throws CameraAccessException {
openCameraForUid(cameraId, callback, handler, USE_CALLING_UID);
} 下面的代码忽略掉了一些参数检查相关操作,最终主要调用了 openCameraDeviceUserAsync 方法。
public void openCameraForUid(@NonNull String cameraId,
@NonNull final CameraDevice.StateCallback callback, @Nullable Handler handler,
int clientUid)
throws CameraAccessException {
/* Do something in*/
......
/* Do something out*/
openCameraDeviceUserAsync(cameraId, callback, handler, clientUid);
}参考如下注释分析:
private CameraDevice openCameraDeviceUserAsync(String cameraId,
CameraDevice.StateCallback callback, Handler handler, final int uid)
throws CameraAccessException {
CameraCharacteristics characteristics = getCameraCharacteristics(cameraId);
CameraDevice device = null;
synchronized (mLock) {
ICameraDeviceUser cameraUser = null;
android.hardware.camera2.impl.CameraDeviceImpl deviceImpl = //实例化一个 CameraDeviceImpl。构造时传入了 CameraDevice.StateCallback 以及 Handler。
new android.hardware.camera2.impl.CameraDeviceImpl(
cameraId,
callback,
handler,
characteristics,
mContext.getApplicationInfo().targetSdkVersion);
ICameraDeviceCallbacks callbacks = deviceImpl.getCallbacks(); //获取 CameraDeviceCallback 实例,这是提供给远端连接到 CameraDeviceImpl 的接口。
try {
if (supportsCamera2ApiLocked(cameraId)) { //HAL3 中走的是这一部分逻辑,主要是从 CameraManagerGlobal 中获取 CameraService 的本地接口,通过它远端调用(采用 Binder 机制) connectDevice 方法连接到相机设备。
//注意返回的 cameraUser 实际上指向的是远端 CameraDeviceClient 的本地接口。
// Use cameraservice''s cameradeviceclient implementation for HAL3.2+ devices
ICameraService cameraService = CameraManagerGlobal.get().getCameraService();
if (cameraService == null) {
throw new ServiceSpecificException(
ICameraService.ERROR_DISCONNECTED,
"Camera service is currently unavailable");
}
cameraUser = cameraService.connectDevice(callbacks, cameraId,
mContext.getOpPackageName(), uid);
} else {
// Use legacy camera implementation for HAL1 devices
int id;
try {
id = Integer.parseInt(cameraId);
} catch (NumberFormatException e) {
throw new IllegalArgumentException("Expected cameraId to be numeric, but it was: "
+ cameraId);
}
Log.i(TAG, "Using legacy camera HAL.");
cameraUser = CameraDeviceUserShim.connectBinderShim(callbacks, id);
}
} catch (ServiceSpecificException e) {
/* Do something in */
......
/* Do something out */
}
// TODO: factor out callback to be non-nested, then move setter to constructor
// For now, calling setRemoteDevice will fire initial
// onOpened/onUnconfigured callbacks.
// This function call may post onDisconnected and throw CAMERA_DISCONNECTED if
// cameraUser dies during setup.
deviceImpl.setRemoteDevice(cameraUser); //将 CameraDeviceClient 设置到 CameraDeviceImpl 中进行管理。
device = deviceImpl;
}
return device;
} (2)CameraDeviceImpl : /frameworks/base/core/java/android/hardware/camera2/Impl/CameraDeviceImpl.java
在继续向下分析打开相机流程之前,先简单看看调用到的 CameraDeviceImpl 中的 setRemoteDevice 方法,主要是将获取到的远端设备保存起来:
/**
* Set remote device, which triggers initial onOpened/onUnconfigured callbacks
*
* <p>This function may post onDisconnected and throw CAMERA_DISCONNECTED if remoteDevice dies
* during setup.</p>
*
*/
public void setRemoteDevice(ICameraDeviceUser remoteDevice) throws CameraAccessException {
synchronized(mInterfaceLock) {
// TODO: Move from decorator to direct binder-mediated exceptions
// If setRemoteFailure already called, do nothing
if (mInError) return;
mRemoteDevice = new ICameraDeviceUserWrapper(remoteDevice); //通过 ICameraDeviceUserWrapper 给远端设备实例加上一层封装。
IBinder remoteDeviceBinder = remoteDevice.asBinder(); //使用 Binder 机制的一些基本设置。
// For legacy camera device, remoteDevice is in the same process, and
// asBinder returns NULL.
if (remoteDeviceBinder != null) {
try {
remoteDeviceBinder.linkToDeath(this, /*flag*/ 0); //如果这个binder消失,为标志信息注册一个接收器。
} catch (RemoteException e) {
CameraDeviceImpl.this.mDeviceHandler.post(mCallOnDisconnected);
throw new CameraAccessException(CameraAccessException.CAMERA_DISCONNECTED,
"The camera device has encountered a serious error");
}
}
mDeviceHandler.post(mCallOnOpened); //需此处触发 onOpened 与 onUnconfigured 这两个回调,每个回调都是通过 mDeviceHandler 启用一个新线程来调用的。
mDeviceHandler.post(mCallOnUnconfigured);
}
} (3)Runtime:通过 Binder 机制,我们远端调用了 connectDevice 方法(在 C++ 中称为函数,但说成方法可能更顺口一些),这个方法实现在 CameraService 类中。
(4)CameraService:/frameworks/av/services/camera/libcameraservice/CameraService.cpp
Status CameraService::connectDevice(
const sp<hardware::camera2::ICameraDeviceCallbacks>& cameraCb,
const String16& cameraId,
const String16& clientPackageName,
int clientUid,
/*out*/
sp<hardware::camera2::ICameraDeviceUser>* device) {
ATRACE_CALL();
Status ret = Status::ok();
String8 id = String8(cameraId);
sp<CameraDeviceClient> client = nullptr;
//此处调用的 connectHelper 方法才真正实现了连接逻辑(HAL1 时最终也调用到这个方法)。需要注意的是,设定的模板类型是 ICameraDeviceCallbacks 以及 CameraDeviceClient。
ret = connectHelper<hardware::camera2::ICameraDeviceCallbacks,CameraDeviceClient>(cameraCb, id,
CAMERA_HAL_API_VERSION_UNSPECIFIED, clientPackageName,
clientUid, USE_CALLING_PID, API_2,
/*legacyMode*/ false, /*shimUpdateOnly*/ false,
/*out*/client);
if(!ret.isOk()) {
logRejected(id, getCallingPid(), String8(clientPackageName),
ret.toString8());
return ret;
}
*device = client; //client 指向的类型是 CameraDeviceClient,其实例则是最终的返回结果。
return ret;
} connectHelper 内容较多,忽略掉我们还无需关注的地方分析:
template<class CALLBACK, class CLIENT>
Status CameraService::connectHelper(const sp<CALLBACK>& cameraCb, const String8& cameraId,
int halVersion, const String16& clientPackageName, int clientUid, int clientPid,
apiLevel effectiveApiLevel, bool legacyMode, bool shimUpdateOnly,
/*out*/sp<CLIENT>& device) {
binder::Status ret = binder::Status::ok();
String8 clientName8(clientPackageName);
/* Do something in */
......
/* Do something out */
sp<BasicClient> tmp = nullptr;
//调用 makeClient 生成 CameraDeviceClient 实例。
if(!(ret = makeClient(this, cameraCb, clientPackageName, cameraId, facing, clientPid,
clientUid, getpid(), legacyMode, halVersion, deviceVersion, effectiveApiLevel,
/*out*/&tmp)).isOk()) {
return ret;
}
//初始化 CLIENT 实例。注意此处的模板类型 CLIENT 即是 CameraDeviceClient,传入的参数 mCameraProviderManager 则是与 HAL service 有关。
client = static_cast<CLIENT*>(tmp.get());
LOG_ALWAYS_FATAL_IF(client.get() == nullptr, "%s: CameraService in invalid state",
__FUNCTION__);
err = client->initialize(mCameraProviderManager);
/* Do something in */
......
/* Do something out */
// Important: release the mutex here so the client can call back into the service from its
// destructor (can be at the end of the call)
device = client;
return ret;
} makeClient 主要是根据 API 版本以及 HAL 版本来选择生成具体的 Client 实例,Client 就沿着前面分析下来的路径返回到 CameraDeviceImpl 实例中,被保存到 mRemoteDevice。
Status CameraService::makeClient(const sp<CameraService>& cameraService,
const sp<IInterface>& cameraCb, const String16& packageName, const String8& cameraId,
int facing, int clientPid, uid_t clientUid, int servicePid, bool legacyMode,
int halVersion, int deviceVersion, apiLevel effectiveApiLevel,
/*out*/sp<BasicClient>* client) {
if (halVersion < 0 || halVersion == deviceVersion) {
// Default path: HAL version is unspecified by caller, create CameraClient
// based on device version reported by the HAL.
switch(deviceVersion) {
case CAMERA_DEVICE_API_VERSION_1_0:
/* Do something in */
......
/* Do something out */
case CAMERA_DEVICE_API_VERSION_3_0:
case CAMERA_DEVICE_API_VERSION_3_1:
case CAMERA_DEVICE_API_VERSION_3_2:
case CAMERA_DEVICE_API_VERSION_3_3:
case CAMERA_DEVICE_API_VERSION_3_4:
if (effectiveApiLevel == API_1) { // Camera1 API route
sp<ICameraClient> tmp = static_cast<ICameraClient*>(cameraCb.get());
*client = new Camera2Client(cameraService, tmp, packageName, cameraIdToInt(cameraId),
facing, clientPid, clientUid, servicePid, legacyMode);
} else { // Camera2 API route : 实例化了 CameraDeviceClient 类作为 Client(注意此处构造传入了 ICameraDeviceCallbacks,这是连接到 CameraDeviceImpl 的远端回调)
sp<hardware::camera2::ICameraDeviceCallbacks> tmp =
static_cast<hardware::camera2::ICameraDeviceCallbacks*>(cameraCb.get());
*client = new CameraDeviceClient(cameraService, tmp, packageName, cameraId,
facing, clientPid, clientUid, servicePid);
}
break;
default:
// Should not be reachable
ALOGE("Unknown camera device HAL version: %d", deviceVersion);
return STATUS_ERROR_FMT(ERROR_INVALID_OPERATION,
"Camera device \"%s\" has unknown HAL version %d",
cameraId.string(), deviceVersion);
}
} else {
/* Do something in */
......
/* Do something out */
}
return Status::ok();
}至此,打开相机流程中,从 App 到 CameraService 的调用逻辑基本上就算走完了。
简图总结:
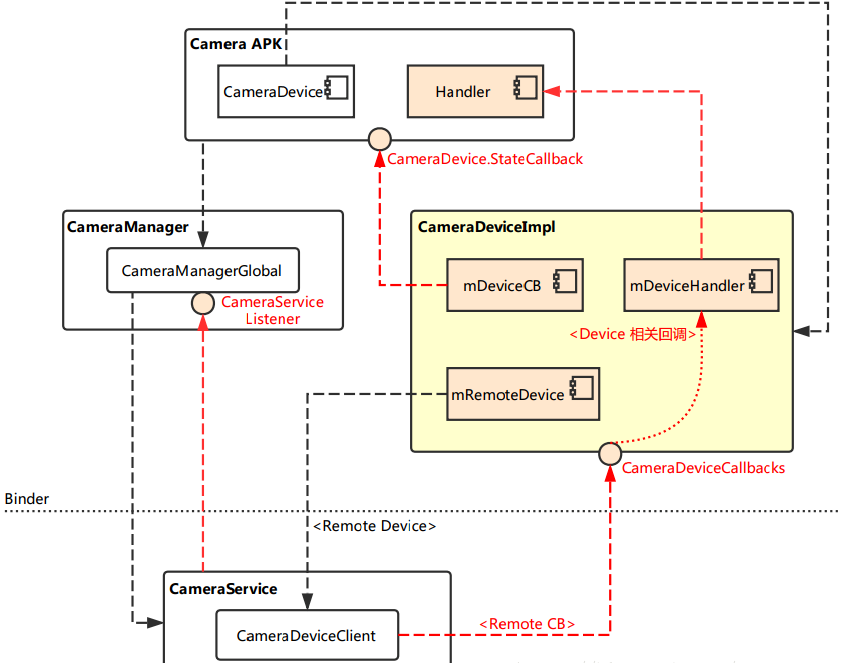
Ps:
- CameraManagerGlobal 是真正的实现层,它与 JAVA 层的 CameraService 创建连接,从而创建相机的连路。
- CameraDeviceImpl 相当于运行上下文,它取代了 Android N 之前的 JNI 层。
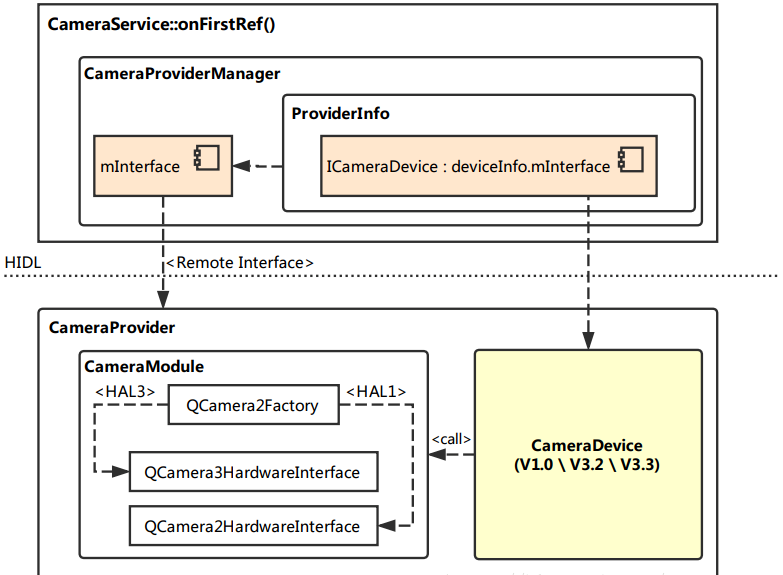
3. 从 CameraService 到 HAL Service
由于 Android O 中加入了 Treble 机制,CameraServer 一端主体为 CameraService,它将会寻找现存的 Provider service,将其加入到内部的 CameraProviderManager 中进行管理,相关操作都是通过远端调用进行的。
而 Provider service 一端的主体为 CameraProvider,它在初始化时就已经连接到 libhardware 的 Camera HAL 实现层,并以 CameraModule 来进行管理。
进程的启动后,连路的 “载体” 就搭建完成了(需要注意,此时 QCamera3HWI 还未创建),可用下图简单表示:
而在打开相机时,该层的完整连路会被创建出来,主要调用逻辑如下图:
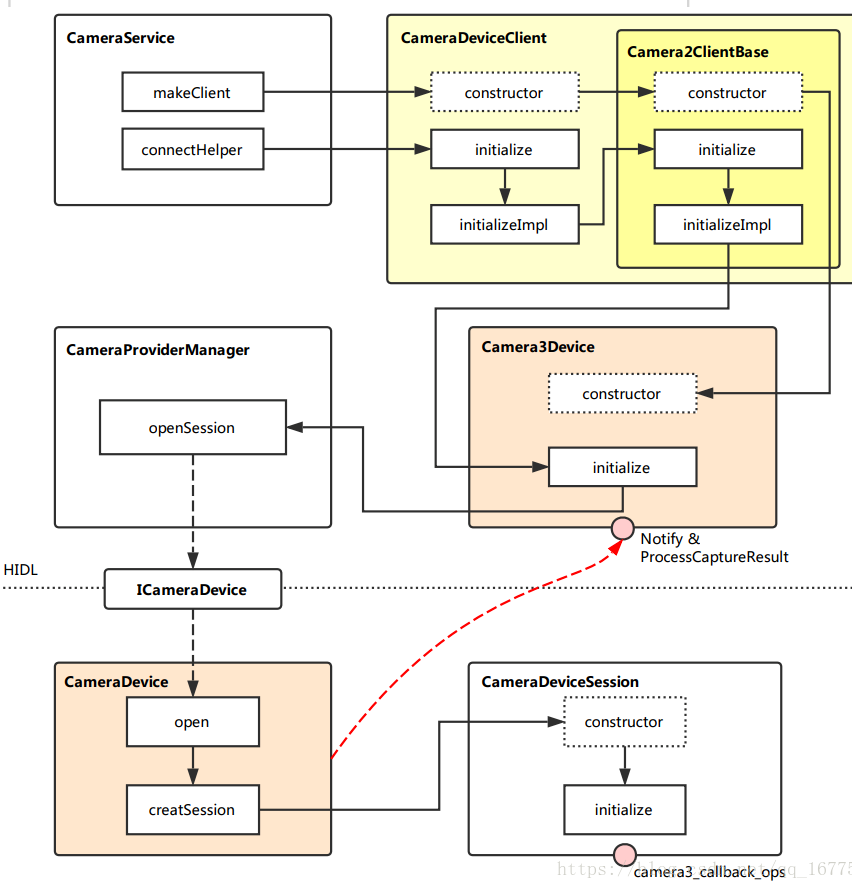
上回讲到,在 CameraService::makeClient 中,实例化了一个 CameraDeviceClient。现在我们就从它的构造函数开始,继续探索打开相机的流程。
这一部分主要活动在 Runtime 层,这里分成 CameraService 与 HAL Service 两侧来分析。
(1)CameraDeviceClient :frameworks\av\services\camera\libcameraservice\api2\CameraDeviceClient.cpp
CameraDeviceClient::CameraDeviceClient(const sp<CameraService>& cameraService,
const sp<hardware::camera2::ICameraDeviceCallbacks>& remoteCallback,
const String16& clientPackageName,
const String8& cameraId,
int cameraFacing,
int clientPid,
uid_t clientUid,
int servicePid) :
Camera2ClientBase(cameraService, remoteCallback, clientPackageName,
cameraId, cameraFacing, clientPid, clientUid, servicePid), //继承它的父类 Camera2ClientBase
mInputStream(),
mStreamingRequestId(REQUEST_ID_NONE),
mRequestIdCounter(0),
mPrivilegedClient(false) {
char value[PROPERTY_VALUE_MAX];
property_get("persist.camera.privapp.list", value, "");
String16 packagelist(value);
if (packagelist.contains(clientPackageName.string())) {
mPrivilegedClient = true;
}
ATRACE_CALL();
ALOGI("CameraDeviceClient %s: Opened", cameraId.string());
}CameraService 在创建 CameraDeviceClient 之后,会调用它的初始化函数:
//对外提供调用的初始化函数接口 initialize。
status_t CameraDeviceClient::initialize(sp<CameraProviderManager> manager) {
return initializeImpl(manager);
}
//初始化的具体实现函数,模板 TProviderPtr 在此处即是 CameraProviderManager 类。
template<typename TProviderPtr>
//首先将父类初始化,注意此处传入了 CameraProviderManager。
status_t CameraDeviceClient::initializeImpl(TProviderPtr providerPtr) {
ATRACE_CALL();
status_t res;
res = Camera2ClientBase::initialize(providerPtr);
if (res != OK) {
return res;
}
//这里是关于 FrameProcessor 的创建与初始化配置等等
String8 threadName;
mFrameProcessor = new FrameProcessorBase(mDevice);
threadName = String8::format("CDU-%s-FrameProc", mCameraIdStr.string());
mFrameProcessor->run(threadName.string());
mFrameProcessor->registerListener(FRAME_PROCESSOR_LISTENER_MIN_ID,
FRAME_PROCESSOR_LISTENER_MAX_ID,
/*listener*/this,
/*sendPartials*/true);
return OK;
} (2)Camera2ClientBase:frameworks\av\services\camera\libcameraservice\common\Camera2ClientBase.cpp
template <typename TClientBase> //模板 TClientBase,在 CameraDeviceClient 继承 Camera2ClientBase 时被指定为 CameraDeviceClientBase。
Camera2ClientBase<TClientBase>::Camera2ClientBase( //构造的相关参数,以及初始化列表,这里面需要注意 TCamCallbacks 在 CameraDeviceClientBase 中被指定为了 ICameraDeviceCallbacks。
const sp<CameraService>& cameraService,
const sp<TCamCallbacks>& remoteCallback,
const String16& clientPackageName,
const String8& cameraId,
int cameraFacing,
int clientPid,
uid_t clientUid,
int servicePid):
TClientBase(cameraService, remoteCallback, clientPackageName,
cameraId, cameraFacing, clientPid, clientUid, servicePid),
mSharedCameraCallbacks(remoteCallback),
mDeviceVersion(cameraService->getDeviceVersion(TClientBase::mCameraIdStr)),
mDeviceActive(false)
{
ALOGI("Camera %s: Opened. Client: %s (PID %d, UID %d)", cameraId.string(),
String8(clientPackageName).string(), clientPid, clientUid);
mInitialClientPid = clientPid;
mDevice = new Camera3Device(cameraId); //创建了一个 Camera3Device。
LOG_ALWAYS_FATAL_IF(mDevice == 0, "Device should never be NULL here.");
}回去再看看初始化函数:
template <typename TClientBase> //初始化函数接口,真正的实现部分在 initializeImpl 中。
status_t Camera2ClientBase<TClientBase>::initialize(sp<CameraProviderManager> manager) {
return initializeImpl(manager);
}
//TClientBase 对应 CameraDeviceClientBase,而 TProviderPtr 对应的是 CameraProviderManager。
template <typename TClientBase>
template <typename TProviderPtr>
status_t Camera2ClientBase<TClientBase>::initializeImpl(TProviderPtr providerPtr) {
ATRACE_CALL();
ALOGV("%s: Initializing client for camera %s", __FUNCTION__,
TClientBase::mCameraIdStr.string());
status_t res;
// Verify ops permissions
res = TClientBase::startCameraOps(); //调用 CameraDeviceClientBase 的 startCameraOps 方法,检查 ops 的权限。
if (res != OK) {
return res;
}
if (mDevice == NULL) {
ALOGE("%s: Camera %s: No device connected",
__FUNCTION__, TClientBase::mCameraIdStr.string());
return NO_INIT;
}
res = mDevice->initialize(providerPtr); //初始化 Camera3Device 的实例,注意此处传入了 CameraProviderManager。
if (res != OK) {
ALOGE("%s: Camera %s: unable to initialize device: %s (%d)",
__FUNCTION__, TClientBase::mCameraIdStr.string(), strerror(-res), res);
return res;
}
//在 Camera3Device 实例中设置 Notify 回调。
wp<CameraDeviceBase::NotificationListener> weakThis(this);
res = mDevice->setNotifyCallback(weakThis);
return OK;
} (3)Camera3Device:frameworks\av\services\camera\libcameraservice\device3\Camera3Device.cpp
Camera3Device::Camera3Device(const String8 &id):
mId(id),
mOperatingMode(NO_MODE),
mIsConstrainedHighSpeedConfiguration(false),
mStatus(STATUS_UNINITIALIZED),
mStatusWaiters(0),
mUsePartialResult(false),
mNumPartialResults(1),
mTimestampOffset(0),
mNextResultFrameNumber(0),
mNextReprocessResultFrameNumber(0),
mNextShutterFrameNumber(0),
mNextReprocessShutterFrameNumber(0),
mListener(NULL),
mVendorTagId(CAMERA_METADATA_INVALID_VENDOR_ID)
{
ATRACE_CALL();
//在这个观察构造函数中设定了两个回调接口:
camera3_callback_ops::notify = &sNotify;
camera3_callback_ops::process_capture_result = &sProcessCaptureResult;
ALOGV("%s: Created device for camera %s", __FUNCTION__, mId.string());
}其初始化函数篇幅较长,这里省略掉了关于 RequestMetadataQueue 的相关操作。
status_t Camera3Device::initialize(sp<CameraProviderManager> manager) {
ATRACE_CALL();
Mutex::Autolock il(mInterfaceLock);
Mutex::Autolock l(mLock);
ALOGV("%s: Initializing HIDL device for camera %s", __FUNCTION__, mId.string());
if (mStatus != STATUS_UNINITIALIZED) {
CLOGE("Already initialized!");
return INVALID_OPERATION;
}
if (manager == nullptr) return INVALID_OPERATION;
sp<ICameraDeviceSession> session;
ATRACE_BEGIN("CameraHal::openSession");
status_t res = manager->openSession(mId.string(), this, //调用CameraProviderManager的openSession方法,开启了远端的Session
/*out*/ &session);
ATRACE_END();
if (res != OK) {
SET_ERR_L("Could not open camera session: %s (%d)", strerror(-res), res);
return res;
}
/* Do something in */
......
/* Do something out */
return initializeCommonLocked();
} (4)CameraProviderManager:frameworks\av\services\camera\libcameraservice\common\CameraProviderManager.cpp
status_t CameraProviderManager::openSession(const std::string &id,
const sp<hardware::camera::device::V3_2::ICameraDeviceCallback>& callback,
/*out*/
sp<hardware::camera::device::V3_2::ICameraDeviceSession> *session) {
std::lock_guard<std::mutex> lock(mInterfaceMutex);
auto deviceInfo = findDeviceInfoLocked(id, //首先调用 findDeviceInfoLocked,获取 HAL3 相关的 DeviceInfo3
/*minVersion*/ {3,0}, /*maxVersion*/ {4,0});
if (deviceInfo == nullptr) return NAME_NOT_FOUND;
auto *deviceInfo3 = static_cast<ProviderInfo::DeviceInfo3*>(deviceInfo);
Status status;
hardware::Return<void> ret;
//通过远端调用 CameraDevice 的 open 方法,创建 CameraDeviceSession 实例并将其本地调用接口通过入参 session 返回。
ret = deviceInfo3->mInterface->open(callback, [&status, &session]
(Status s, const sp<device::V3_2::ICameraDeviceSession>& cameraSession) {
status = s;
if (status == Status::OK) {
*session = cameraSession;
}
});
if (!ret.isOk()) {
ALOGE("%s: Transaction error opening a session for camera device %s: %s",
__FUNCTION__, id.c_str(), ret.description().c_str());
return DEAD_OBJECT;
}
return mapToStatusT(status);
} (5)CameraDevice:hardware\interfaces\camera\device\3.2\default\CameraDevice.cpp
CameraDevice 的实例实际上在初始化 HAL Service 之后就存在了。 前面说到,通过 CameraProviderManager 中的 deviceInfo 接口,调用远端 CameraDevice 实例的 open 方法,下面就来看看它的代码实现:
Return<void> CameraDevice::open(const sp<ICameraDeviceCallback>& callback, open_cb _hidl_cb) {
Status status = initStatus();
sp<CameraDeviceSession> session = nullptr;
if (callback == nullptr) {
ALOGE("%s: cannot open camera %s. callback is null!",
__FUNCTION__, mCameraId.c_str());
_hidl_cb(Status::ILLEGAL_ARGUMENT, nullptr);
return Void();
}
if (status != Status::OK) {
/* Do something in */
......
/* Do something out */
} else {
mLock.lock();
/* Do something in */
......
/* Do something out */
/** Open HAL device */
status_t res;
camera3_device_t *device;
ATRACE_BEGIN("camera3->open");
res = mModule->open(mCameraId.c_str(), //注意 mModule 是在 HAL Service 初始化时就已经配置好的,它对从libhardware库中加载的 Camera HAL 接口进行了一层封装,从这里往下就会一路走到 QCamera3HWI 的构造流程去。
reinterpret_cast<hw_device_t**>(&device));
ATRACE_END();
/* Do something in */
......
/* Do something out */
//创建 session 并让内部成员 mSession 持有,具体实现的函数为 creatSession。
session = createSession(
device, info.static_camera_characteristics, callback);
/* Do something in */
......
/* Do something out */
mSession = session;
IF_ALOGV() {
session->getInterface()->interfaceChain([](
::android::hardware::hidl_vec<::android::hardware::hidl_string> interfaceChain) {
ALOGV("Session interface chain:");
for (auto iface : interfaceChain) {
ALOGV(" %s", iface.c_str());
}
});
}
mLock.unlock();
}
_hidl_cb(status, session->getInterface());
return Void();
} 而 creatSession 中直接创建了一个 CameraDeviceSession。当然在其构造函数中会调用内部的初始化函数,然后会进入 HAL 接口层 QCamera3HWI 的初始化流程,至此,从 CameraService 到 HAL Service 这一部分的打开相机流程就基本走通了。
简图总结:

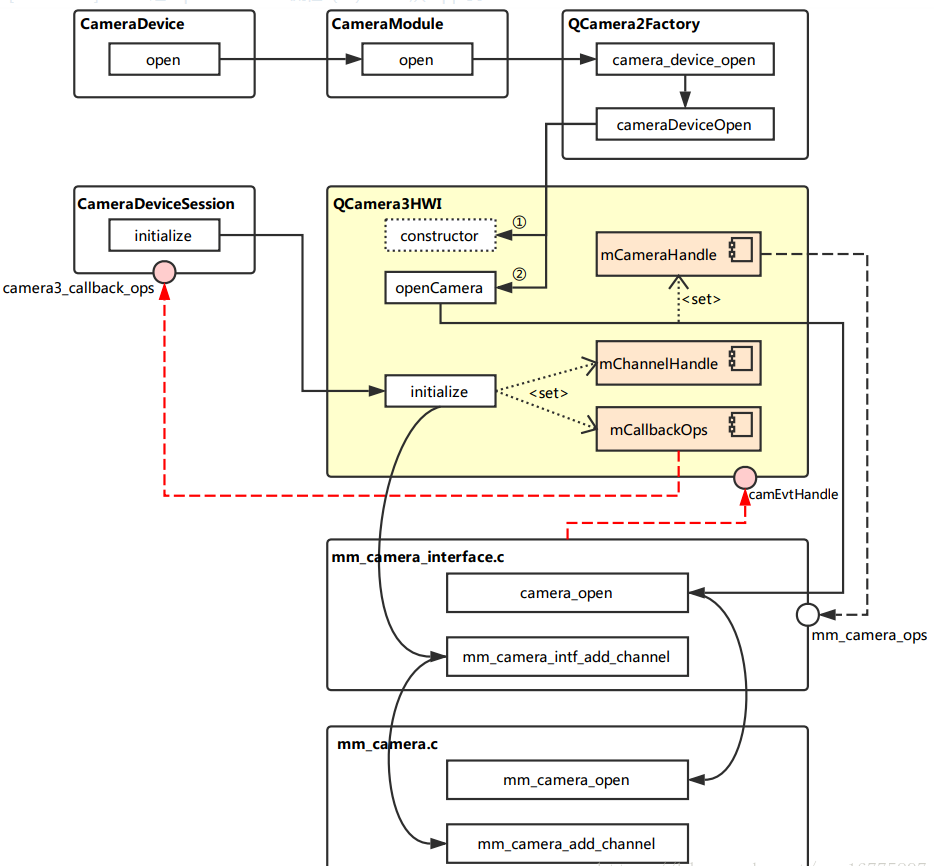
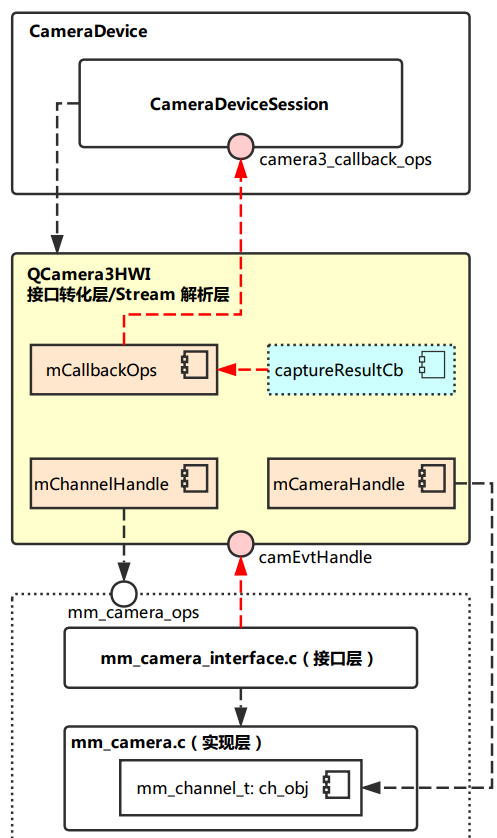
4. 从 HAL Service 到 Camera HAL
在 HAL3 中,Camera HAL 的接口转化层(以及流解析层)由 QCamera3HardwareInterface 担当,而接口层与实现层与 HAL1 中基本没什么差别,都是在 mm_camera_interface.c 与 mm_camera.c 中。
那么接口转化层的实例是何时创建的,又是怎么初始化的,创建它的时候,与接口层、实现层又有什么交互?通过下图展示的主要调用流程:
(1)CameraModule(HAL Servic) : hardware\interfaces\camera\common\1.0\default\CameraModule.cpp
上回说到,CameraDevice::open 的实现中,调用了 mModule->open,即 CameraModule::open,通过代码来看,它做的事并不多,主要是调用 mModule->common.methods->open,来进入下一层级的流程。
而这里则需要注意了,open 是一个函数指针,它指向的是 QCamera2Factory 的 camera_device_open 方法,至于为什么和 QCamera2Factory 有关,这就要回头看 HAL Service 的启动初始化流程了。
int CameraModule::open(const char* id, struct hw_device_t** device) {
int res;
ATRACE_BEGIN("camera_module->open");
res = filterOpenErrorCode(mModule->common.methods->open(&mModule->common, id, device));
ATRACE_END();
return res;
}
(2)QCamera2Factory(Camera HAL):hardware\qcom\camera\qcamera2\QCamera2Factory.cpp
/*===========================================================================
* FUNCTION : camera_device_open
*
* DESCRIPTION: static function to open a camera device by its ID
*
* PARAMETERS :
* @camera_id : camera ID
* @hw_device : ptr to struct storing camera hardware device info
*
* RETURN : int32_t type of status
* NO_ERROR -- success
* none-zero failure code
*==========================================================================*/
int QCamera2Factory::camera_device_open(
const struct hw_module_t *module, const char *id,
struct hw_device_t **hw_device)
{
/* Do something in */
......
/* Do something out */
#ifdef QCAMERA_HAL1_SUPPORT //注意到这里通过宏定义添加了对 HAL1 的兼容操作。实际上是要调用 cameraDeviceOpen 来进行下一步操作。
if(gQCameraMuxer)
rc = gQCameraMuxer->camera_device_open(module, id, hw_device);
else
#endif
rc = gQCamera2Factory->cameraDeviceOpen(atoi(id), hw_device);
return rc;
}
struct hw_module_methods_t QCamera2Factory::mModuleMethods = {
.open = QCamera2Factory::camera_device_open, //这里就将前面所说的 open 函数指针指定为了 camera_device_open 这个方法。
}; cameraDeviceOpen 的工作:
/*===========================================================================
* FUNCTION : cameraDeviceOpen
*
* DESCRIPTION: open a camera device with its ID
*
* PARAMETERS :
* @camera_id : camera ID
* @hw_device : ptr to struct storing camera hardware device info
*
* RETURN : int32_t type of status
* NO_ERROR -- success
* none-zero failure code
*==========================================================================*/
int QCamera2Factory::cameraDeviceOpen(int camera_id,
struct hw_device_t **hw_device)
{
/* Do something in */
......
/* Do something out */
if ( mHalDescriptors[camera_id].device_version == CAMERA_DEVICE_API_VERSION_3_0 ) {
QCamera3HardwareInterface *hw = new QCamera3HardwareInterface(mHalDescriptors[camera_id].cameraId, //首先创建了 QCamera3HardwareInterface 的实例。
mCallbacks);
if (!hw) {
LOGE("Allocation of hardware interface failed");
return NO_MEMORY;
}
rc = hw->openCamera(hw_device); //调用实例的 openCamera 方法。
if (rc != 0) {
delete hw;
}
}
/* Do something in */
......
/* Do something out */
return rc;
} (3)QCamera3HardwareInterface : hardware\qcom\camera\qcamera2\hal3\QCamera3HWI.cpp
首先需要注意的是内部成员 mCameraOps 的定义。 在构造实例时,有 mCameraDevice.ops = &mCameraOps;(关键点)
camera3_device_ops_t QCamera3HardwareInterface::mCameraOps = {
.initialize = QCamera3HardwareInterface::initialize,
.configure_streams = QCamera3HardwareInterface::configure_streams,
.register_stream_buffers = NULL,
.construct_default_request_settings = QCamera3HardwareInterface::construct_default_request_settings,
.process_capture_request = QCamera3HardwareInterface::process_capture_request,
.get_metadata_vendor_tag_ops = NULL,
.dump = QCamera3HardwareInterface::dump,
.flush = QCamera3HardwareInterface::flush,
.reserved = {0},
}; 再来继续看看 openCamera 实现:
int QCamera3HardwareInterface::openCamera(struct hw_device_t **hw_device)
{
/* Do something in */
......
/* Do something out */
rc = openCamera(); //调用另一个 openCamera 方法,这是具体实现的部分。
if (rc == 0) {
*hw_device = &mCameraDevice.common; //打开相机成功后,将设备结构中的 common 部分通过双重指针 hw_device 返回。
} else
*hw_device = NULL;
/* Do something in */
......
/* Do something out */
return rc;
}
int QCamera3HardwareInterface::openCamera()
{
/* Do something in */
......
/* Do something out */
rc = camera_open((uint8_t)mCameraId, &mCameraHandle); //这里就开始进入接口层了,调用的是接口层中的 camera_open 接口。注意此处获取到了 mCameraHandle.
/* Do something in */
......
/* Do something out */
rc = mCameraHandle->ops->register_event_notify(mCameraHandle->camera_handle, //注意这里传入了一个 camEvtHandle
camEvtHandle, (void *)this);
/* Do something in */
......
/* Do something out */
rc = mCameraHandle->ops->get_session_id(mCameraHandle->camera_handle,
&sessionId[mCameraId]);
/* Do something in */
......
/* Do something out */
return NO_ERROR;
} 上面是接口转化层中,关于 openCamera 的部分,下面继续看看它的初始化函数。 在前面已经分析过,创建 CameraDeviceSession 实例时,会调用它内部的初始化方法,而这其中包含了调用 QCamera3HWI 的初始化方法 initialize
int QCamera3HardwareInterface::initialize(const struct camera3_device *device,
const camera3_callback_ops_t *callback_ops)
{
LOGD("E");
QCamera3HardwareInterface *hw =
reinterpret_cast<QCamera3HardwareInterface *>(device->priv);
if (!hw) {
LOGE("NULL camera device");
return -ENODEV;
}
int rc = hw->initialize(callback_ops); //调用了真正实现的初始化逻辑的函数
LOGD("X");
return rc;
}
int QCamera3HardwareInterface::initialize(
const struct camera3_callback_ops *callback_ops)
{
ATRACE_CALL();
int rc;
LOGI("E :mCameraId = %d mState = %d", mCameraId, mState);
pthread_mutex_lock(&mMutex);
// Validate current state
switch (mState) {
case OPENED:
/* valid state */
break;
default:
LOGE("Invalid state %d", mState);
rc = -ENODEV;
goto err1;
}
rc = initParameters(); //参数(mParameters)初始化,注意这里的参数和 CameraParameter 是不同的,它是 metadata_buffer 相关参数的结构。
if (rc < 0) {
LOGE("initParamters failed %d", rc);
goto err1;
}
mCallbackOps = callback_ops; //这里将 camera3_call_back_ops 与 mCallbackOps 关联了起来。
mChannelHandle = mCameraHandle->ops->add_channel( //获取 mChannelHandle 这一句柄,调用的方法实际是 mm_camera_interface.c 中的 mm_camera_intf_add_channel。
mCameraHandle->camera_handle, NULL, NULL, this);
if (mChannelHandle == 0) {
LOGE("add_channel failed");
rc = -ENOMEM;
pthread_mutex_unlock(&mMutex);
return rc;
}
pthread_mutex_unlock(&mMutex);
mCameraInitialized = true;
mState = INITIALIZED;
LOGI("X");
return 0;
err1:
pthread_mutex_unlock(&mMutex);
return rc;
} (4)mm_camera_interface.c (接口层) :hardware\qcom\camera\qcamera2\stack\mm-camera-interface\src\mm_camera_interface.c
camera_open 中干的事也不多,省略掉了关于为 cam_obj 分配内存以及初始化的部分。实际上是调用实现层中的 mm_camera_open 来真正实现打开相机设备的操作,设备的各种信息都填充到 cam_obj 结构中。
int32_t camera_open(uint8_t camera_idx, mm_camera_vtbl_t **camera_vtbl)
{
int32_t rc = 0;
mm_camera_obj_t *cam_obj = NULL;
/* Do something in */
......
/* Do something out */
rc = mm_camera_open(cam_obj);
/* Do something in */
......
/* Do something out */
} 而关于初始化时调用的 mm_camera_intf_add_channel 代码如下:
static uint32_t mm_camera_intf_add_channel(uint32_t camera_handle,
mm_camera_channel_attr_t *attr,
mm_camera_buf_notify_t channel_cb,
void *userdata)
{
uint32_t ch_id = 0;
mm_camera_obj_t * my_obj = NULL;
LOGD("E camera_handler = %d", camera_handle);
pthread_mutex_lock(&g_intf_lock);
my_obj = mm_camera_util_get_camera_by_handler(camera_handle);
if(my_obj) {
pthread_mutex_lock(&my_obj->cam_lock);
pthread_mutex_unlock(&g_intf_lock);
ch_id = mm_camera_add_channel(my_obj, attr, channel_cb, userdata); //通过调用实现层的 mm_camera_add_channel 来获取一个 channel id,也就是其句柄。
} else {
pthread_mutex_unlock(&g_intf_lock);
}
LOGD("X ch_id = %d", ch_id);
return ch_id;
} (5) mm_camera.c (实现层) :hardware\qcom\camera\qcamera2\stack\mm-camera-interface\src\mm_camera.c
终于来到最底层的实现了,mm_camera_open 主要工作是填充 my_obj,并且启动、初始化一些线程相关的东西,关于线程的部分我这里就省略掉了。
int32_t mm_camera_open(mm_camera_obj_t *my_obj)
{
char dev_name[MM_CAMERA_DEV_NAME_LEN];
int32_t rc = 0;
int8_t n_try=MM_CAMERA_DEV_OPEN_TRIES;
uint8_t sleep_msec=MM_CAMERA_DEV_OPEN_RETRY_SLEEP;
int cam_idx = 0;
const char *dev_name_value = NULL;
int l_errno = 0;
pthread_condattr_t cond_attr;
LOGD("begin\n");
if (NULL == my_obj) {
goto on_error;
}
dev_name_value = mm_camera_util_get_dev_name(my_obj->my_hdl); //此处调用的函数是为了获取 my_obj 的句柄,这里不深入分析。
if (NULL == dev_name_value) {
goto on_error;
}
snprintf(dev_name, sizeof(dev_name), "/dev/%s",
dev_name_value);
sscanf(dev_name, "/dev/video%d", &cam_idx);
LOGD("dev name = %s, cam_idx = %d", dev_name, cam_idx);
do{
n_try--;
errno = 0;
my_obj->ctrl_fd = open(dev_name, O_RDWR | O_NONBLOCK); //读取设备文件的文件描述符,存到 my_obj->ctrl_fd 中。
l_errno = errno;
LOGD("ctrl_fd = %d, errno == %d", my_obj->ctrl_fd, l_errno);
if((my_obj->ctrl_fd >= 0) || (errno != EIO && errno != ETIMEDOUT) || (n_try <= 0 )) {
break;
}
LOGE("Failed with %s error, retrying after %d milli-seconds",
strerror(errno), sleep_msec);
usleep(sleep_msec * 1000U);
}while (n_try > 0);
if (my_obj->ctrl_fd < 0) {
LOGE("cannot open control fd of ''%s'' (%s)\n",
dev_name, strerror(l_errno));
if (l_errno == EBUSY)
rc = -EUSERS;
else
rc = -1;
goto on_error;
} else {
mm_camera_get_session_id(my_obj, &my_obj->sessionid); //成功获取到文件描述符后,就要获取 session 的 id 了。
LOGH("Camera Opened id = %d sessionid = %d", cam_idx, my_obj->sessionid);
}
/* Do something in */
......
/* Do something out */
/* unlock cam_lock, we need release global intf_lock in camera_open(),
* in order not block operation of other Camera in dual camera use case.*/
pthread_mutex_unlock(&my_obj->cam_lock);
return rc;
} 初始化的相关部分,mm_camera_add_channel 代码如下:
uint32_t mm_camera_add_channel(mm_camera_obj_t *my_obj,
mm_camera_channel_attr_t *attr,
mm_camera_buf_notify_t channel_cb,
void *userdata)
{
mm_channel_t *ch_obj = NULL;
uint8_t ch_idx = 0;
uint32_t ch_hdl = 0;
//从现有的 Channel 中找到第一个状态为 NOTUSED 的,获取到 ch_obj 中
for(ch_idx = 0; ch_idx < MM_CAMERA_CHANNEL_MAX; ch_idx++) {
if (MM_CHANNEL_STATE_NOTUSED == my_obj->ch[ch_idx].state) {
ch_obj = &my_obj->ch[ch_idx];
break;
}
}
/*初始化 ch_obj 结构。首先调用 mm_camera_util_generate_handler 为其生成一个句柄(也是该函数的返回值),
*然后将状态设置为 STOPPED,注意这里还保存了 my_obj 的指针及其 session id,最后调用 mm_channel_init 完成了 Channel 的初始化。*/
if (NULL != ch_obj) {
/* initialize channel obj */
memset(ch_obj, 0, sizeof(mm_channel_t));
ch_hdl = mm_camera_util_generate_handler(ch_idx);
ch_obj->my_hdl = ch_hdl;
ch_obj->state = MM_CHANNEL_STATE_STOPPED;
ch_obj->cam_obj = my_obj;
pthread_mutex_init(&ch_obj->ch_lock, NULL);
ch_obj->sessionid = my_obj->sessionid;
mm_channel_init(ch_obj, attr, channel_cb, userdata);
}
pthread_mutex_unlock(&my_obj->cam_lock);
return ch_hdl;
}简图总结:
总而言之,上面这一顿操作下来后,相机从上到下的整个连路就已经打通,接下来应该只要 APP 按照流程下发 Preview 的 Request 就可以开始获取预览数据了。
三、核心概念:Request
request 是贯穿 camera2 数据处理流程最为重要的概念,应用框架是通过向 camera 子系统发送 request 来获取其想要的 result。
request 有下述几个重要特征:
- 一个 request 可以对应一系列的 result。
- request 应当包含所有必要的配置信息,存放于 metadata 中。如:分辨率和像素格式;sensor、镜头、闪光等的控制信息;3A 操作模式;RAW 到 YUV 处理控件;以及统计信息的生成等。
- request 需要携带对应的 surface(也就是框架里面的 stream),用于接收返回的图像。
- 多个 request 可以同时处于 in-flight 状态,并且 submit request 是 non-blocking 方式的。也就是说,上一个 request 没有处理完,也可以 submit 新的 request。
- 队列中 request 的处理总是按照 FIFO 的形式。
- snapshot 的 request 比 preview 的 request 拥有更高的优先级。
1.request 的整体处理流程如下图:
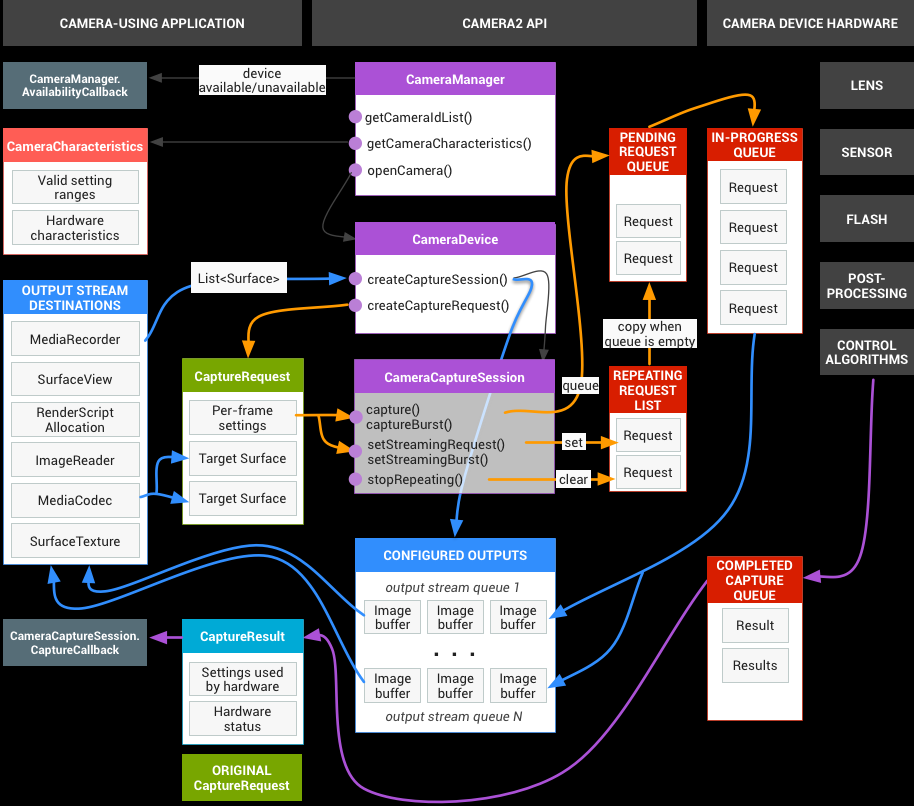
open 流程(黑色箭头线条)
CameraManager注册AvailabilityCallback回调,用于接收相机设备的可用性状态变更的通知。
CameraManager通过调用getCameraIdList()获取到当前可用的camera id,通过getCameraCharacteristcs()函数获取到指定相机设备的特性。
CameraManager调用openCamera()打开指定相机设备,并返回一个CameraDevice对象,后续通过该CameraDevice对象操控具体的相机设备。
使用CameraDevice对象的createCaptureSession()创建一个session,数据请求(预览、拍照等)都是通过session进行。在创建session时,需要提供Surface作为参数,用于接收返回的图像。
configure stream流程(蓝色箭头线条)
申请Surface,如上图的OUTPUT STREAMS DESTINATIONS框,用于在创建session时作为参数,接收session返回的图像。
创建session后,surface会被配置成框架的stream。在框架中,stream定义了图像的size及format。
每个request都需要携带target surface用于指定返回的图像是归属到哪个被configure的stream的。
request处理流程(橙色箭头线条)
CameraDevice对象通过createCaptureRequest()来创建request,每个reqeust都需要有surface和settings(settings就是metadata,request包含的所有配置信息都是放在metadata中的)。
使用session的capture()、captureBurst()、setStreamingRequest()、setStreamingBurst()等api可以将request发送到框架。
预览的request,通过setStreamingRequest()、setStreamingBurst()发送,仅调用一次。将request set到repeating request list里面。只要pending request queue里面没有request,就将repeating list里面的request copy到pending queue里面。
拍照的request,通过capture()、captureBurst()发送,每次需要拍照都会调用。每次触发,都会直接将request入到pending request queue里面,所以拍照的request比预览的request的优先级更高。
in-progress queue代表当前正在处理的request的queue,每处理完一个,都会从pending queue里面拿出来一个新的request放到这里。
数据返回流程(紫色箭头线条)
硬件层面返回的数据会放到result里面返回,会通过session的capture callback回调响应。2.request 在 HAL 的处理方式
(1)framework 发送异步的 request 到 hal。
(2)hal 必须顺序处理 request,对于每一个 request 都要返回 timestamp(shutter,也就是帧的生成时间)、metadata、image buffers。
(3)对于 request 引用的每一类 steam,必须按 FIFO 的方式返回 result。比如:对于预览的 stream,result id 9 必须要先于 result id 10 返回。但是拍照的 stream,当前可以只返回到 result id 7,因为拍照和预览用的 stream 不一样。
(4)hal 需要的信息都通过 request 携带的 metadata 接收,hal 需要返回的信息都通过 result 携带的 metadata 返回。
HAL 处理 request 的整体流程如下图。

request处理流程(黑色箭头线条)
framework异步地submit request到hal,hal依次处理,并返回result。
每个被submit到hal的request都必须携带stream。stream分为input stream和output stream:input stream对应的buffer是已有图像数据的buffer,hal对这些buffer进行reprocess;output stream对应的buffer是empty buffer,hal将生成的图像数据填充的这些buffer里面。
input stream处理流程(图像的INPUT STREAM 1)
request携带input stream及input buffer到hal。
hal进行reprocess,然后新的图像数据重新填充到buffer里面,返回到framework。
output stream处理流程(图像的OUTPUT STREAM 1…N)
request携带output stream及output buffer到hal。
hal经过一系列模块的的处理,将图像数据写到buffer中,返回到frameowork。
-end-

android Camera2 API使用详解
原文: android Camera2 API使用详解
由于最近需要使用相机拍照等功能,鉴于老旧的相机API问题多多,而且新的设备都是基于安卓5.0以上的,于是本人决定研究一下安卓5.0新引入的Camera2 API 来实现 Camera2API地址
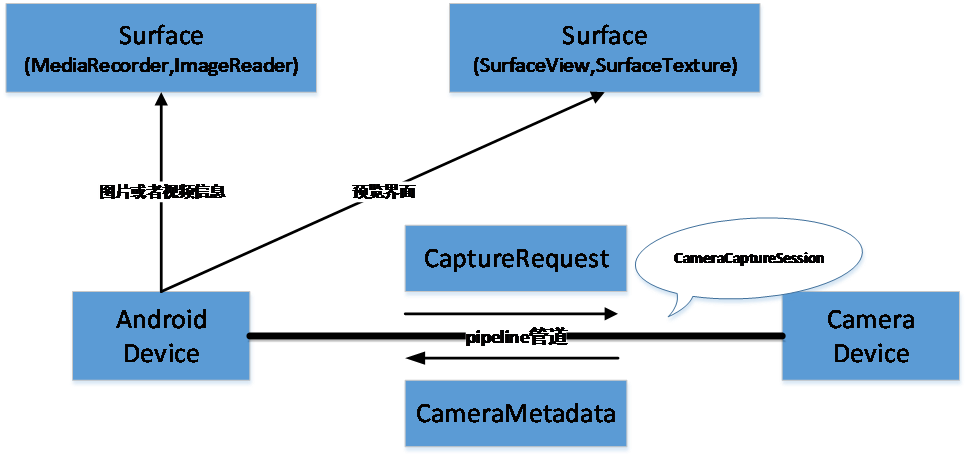
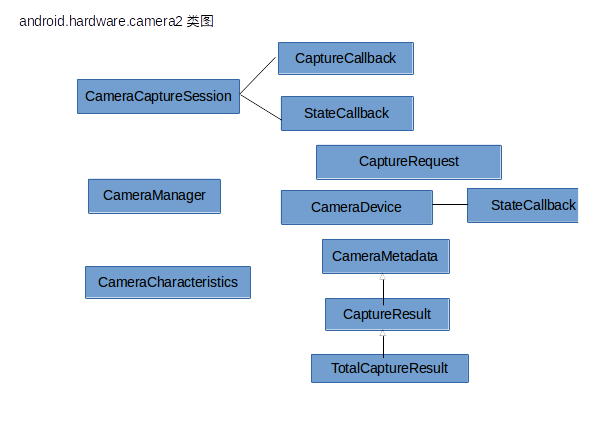
首先我们来熟悉一下官方给的这几个图:

这里引用了管道的概念将安卓设备和摄像头之间联通起来,系统向摄像头发送 Capture 请求,而摄像头会返回 CameraMetadata。这一切建立在一个叫作 CameraCaptureSession 的会话中。

其中 CameraManager 是那个站在高处统管所有摄像投设备(CameraDevice)的管理者,而每个 CameraDevice 自己会负责建立 CameraCaptureSession 以及建立 CaptureRequest。CameraCharacteristics 是 CameraDevice 的属性描述类,非要做个对比的话,那么它与原来的 CameraInfo 有相似性。 类图中有着三个重要的 callback,虽然这增加了阅读代码的难度,但是你必须要习惯,因为这是新包的风格。其中 CameraCaptureSession.CaptureCallback 将处理预览和拍照图片的工作,需要重点对待。这些类是如何相互配合的?下面是简单的流程图。

有了这三张图,那么接下来就好了理解了,我们按照拍照流程的指示,来吧整个过程走一遍
1首先定义一个SufaceView 用来实现预览照片用
surfaceView=(SurfaceView) findViewById(R.id.surfaceView);
surfaceHolder.addCallback(new SurfaceHolder.Callback() {
@Override
public void surfaceCreated(SurfaceHolder holder) {
initCamera();
}
@Override
public void surfaceChanged(SurfaceHolder holder, int format, int width, int height) {
}
@Override
public void surfaceDestroyed(SurfaceHolder holder) {
}
});其中initCamera2()方法是用来初始化相机的方法2获取Camera ID,该ID是用来打开相机的关键,一般后置摄像头是0,前置摄像头是1,这里我们选择后置摄像头做详解mCameraID = "" + CameraCharacteristics.LENS_FACING_BACK;//后摄像头3通过Camera ID 来打开摄像头,这里我们需要使用CamerManager,这是类是一个管理服务类,值得注意的是,打开摄像头是一个相当复杂的过程,不能直接在主线程中直接执行,其核心代码为:HandlerThread handlerThread=new HandlerThread("Camera2");
handlerThread.start();
childHandler=new Handler(handlerThread.getLooper());
mainHandler=new Handler(getMainLooper());mImageReader.setOnImageAvailableListener(new ImageReader.OnImageAvailableListener() { //可以在这里处理拍照得到的临时照片 例如,写入本地
@Override
public void onImageAvailable(ImageReader reader) {
mCameraDevice.close();
surfaceView.setVisibility(View.GONE);
iv_show.setVisibility(View.VISIBLE);
// 拿到拍照照片数据
Image image = reader.acquireNextImage();
ByteBuffer buffer = image.getPlanes()[0].getBuffer();
byte[] bytes = new byte[buffer.remaining()];
buffer.get(bytes);//由缓冲区存入字节数组
final Bitmap bitmap = BitmapFactory.decodeByteArray(bytes, 0, bytes.length);
if (bitmap != null) {
iv_show.setImageBitmap(bitmap);
}
}
}, mainHandler);cameraManager = (CameraManager) getSystemService(Context.CAMERA_SERVICE);
try {
if (ActivityCompat.checkSelfPermission(this, Manifest.permission.CAMERA) != PackageManager.PERMISSION_GRANTED) {
return;
}
//打开摄像头
cameraManager.openCamera(mCameraID, stateCallback, mainHandler);
} catch (CameraAccessException e) {
e.printStackTrace();
}<uses-permission android:name="android.permission.CAMERA"></uses-permission>4 开启相机后有一个回调,stateCallback,该回调是用来返回相机是否正常打开的状态的private CameraDevice.StateCallback stateCallback = new CameraDevice.StateCallback() {
@Override
public void onOpened(CameraDevice camera) {//打开摄像头
mCameraDevice = camera;
//开启预览
takePreview();
}
@Override
public void onDisconnected(CameraDevice camera) {//关闭摄像头
if (null != mCameraDevice) {
mCameraDevice.close();
MainActivity.this.mCameraDevice = null;
}
}
@Override
public void onError(CameraDevice camera, int error) {//发生错误
Toast.makeText(MainActivity.this, "摄像头开启失败", Toast.LENGTH_SHORT).show();
}
};5 相机开启成功后,执行回调中的onOpen方法,在该方法中,我们实现让图像显示在界面上/**
* 开始预览
*/
private void takePreview() {
try {
// 创建预览需要的CaptureRequest.Builder
final CaptureRequest.Builder previewRequestBuilder = mCameraDevice.createCaptureRequest(CameraDevice.TEMPLATE_PREVIEW);
// 将SurfaceView的surface作为CaptureRequest.Builder的目标
previewRequestBuilder.addTarget(surfaceHolder.getSurface());
// 创建CameraCaptureSession,该对象负责管理处理预览请求和拍照请求
mCameraDevice.createCaptureSession(Arrays.asList(surfaceHolder.getSurface(), mImageReader.getSurface()), new CameraCaptureSession.StateCallback() // ③
{
@Override
public void onConfigured(CameraCaptureSession cameraCaptureSession) {
if (null == mCameraDevice) return;
// 当摄像头已经准备好时,开始显示预览
mCameraCaptureSession = cameraCaptureSession;
try {
// 自动对焦
previewRequestBuilder.set(CaptureRequest.CONTROL_AF_MODE, CaptureRequest.CONTROL_AF_MODE_CONTINUOUS_PICTURE);
// 打开闪光灯
previewRequestBuilder.set(CaptureRequest.CONTROL_AE_MODE, CaptureRequest.CONTROL_AE_MODE_ON_AUTO_FLASH);
// 显示预览
CaptureRequest previewRequest = previewRequestBuilder.build();
mCameraCaptureSession.setRepeatingRequest(previewRequest, null, childHandler);
} catch (CameraAccessException e) {
e.printStackTrace();
}
}
@Override
public void onConfigureFailed(CameraCaptureSession cameraCaptureSession) {
Toast.makeText(MainActivity.this, "配置失败", Toast.LENGTH_SHORT).show();
}
}, childHandler);
} catch (CameraAccessException e) {
e.printStackTrace();
}
}6,预览完成后,接下来就是拍照了,注意某些手机的摄像头会和正常手机的摄像头另类,成像会成180度的倒立像,比如nexus 5x,这时候只需要设置rORIENTATIONS的值来调整角度就可以/**
* 拍照
*/
private void takePicture() {
if (mCameraDevice == null) return;
// 创建拍照需要的CaptureRequest.Builder
final CaptureRequest.Builder captureRequestBuilder;
try {
captureRequestBuilder = mCameraDevice.createCaptureRequest(CameraDevice.TEMPLATE_STILL_CAPTURE);
// 将imageReader的surface作为CaptureRequest.Builder的目标
captureRequestBuilder.addTarget(mImageReader.getSurface());
// 自动对焦
captureRequestBuilder.set(CaptureRequest.CONTROL_AF_MODE, CaptureRequest.CONTROL_AF_MODE_CONTINUOUS_PICTURE);
// 自动曝光
captureRequestBuilder.set(CaptureRequest.CONTROL_AE_MODE, CaptureRequest.CONTROL_AE_MODE_ON_AUTO_FLASH);
// 获取手机方向
int rotation = getWindowManager().getDefaultDisplay().getRotation();
// 根据设备方向计算设置照片的方向
captureRequestBuilder.set(CaptureRequest.JPEG_ORIENTATION, ORIENTATIONS.get(rotation)+rORIENTATIONS);
//拍照
CaptureRequest mCaptureRequest = captureRequestBuilder.build();
mCameraCaptureSession.capture(mCaptureRequest, null, childHandler);
} catch (CameraAccessException e) {
e.printStackTrace();
}
}

android camera2 API流程分析
Android camera2 API流程分析
Android5.0之后,新推出来了一个类,android.hardware.camera2,与原来的camera的类实现照相和拍视频的流程有所不同,原来的camera的类并没有深入分析。在做项目的时候,由于需要涉及到这方面的知识,自己学了一下。由于本人英文也不是很优秀,看着看着还要看前人的总结。这个是在半年前就简单总结了一下,现在po上来。如有错误,敬请指教!
一、总体分析
Camera2流程示意图:
CameraManager:管理所有的摄像头(CameraDevice)设备的管理者,打开摄像头等功能。
CameraDevice:一个手机设备一般有两个摄像头(CameraDevice),前置和后置。该类通过CameraCharacteristics对象提供摄像头的硬件信息,配置信息和输出参数等。
CameraCaptureSession:通过CameraDevice 中createCaptureSession(List, CameraCaptureSession.StateCallback, Handler)创建一个CaptureSession会话,所有的CaptureRequest和返回的data都在这个会话中进行。其中,该类中的capture (CaptureRequest request, CameraCaptureSession.CaptureCallback listener, Handler handler)的功能是捕获一次(one-shot),一般用于照相setRepeatingRequest (CaptureRequest request, CameraCaptureSession.CaptureCallbacklistener, Handler handler)是不停的发出capture的请求,也就是一直在捕获画面,一般用于捕获画面输出至预览界面或者录制视频。Capture()比setRepeatingRequest ()优先级高,当在setRepeatingRequest 时进行Capture,会先处理Capture,然后继续setRepeatingRequest 。(PS:可以根据平时使用相机时,首先我们看到的预览界面是setRepeatingRequest 显示出来的,当点击拍照时执行Capture,然后又出现预览界面继续实行setRepeatingRequest )。
CameraRequest:request中定义了照相效果的一些参数,并且必须使用addTarget()函数为这个request添加一个target surface,在最后CameraDevice返回的数据送到这个target surface中。在android camera2的API文档中,这个target surface可以是Surface View,Surface Texture,将返回的数据传递到预览界面中;还可以是MediaRecorder或mageReader,将返回的数据传给这两个类,进行进一步处理,形成视频文件或者图片。
TotalCaptureResult:继承CaptureResult类,CaptureResult继承CameraMetadata类。包含camera device的状态信息。
二、照相流程分析(参考Camera2Basic)

Camera2Basic在显示预览界面和拍照时创建了一个session,两个request,mPreviewRequest和captureBuilder.build()分别将数据返回给预览界面和Image。
显示preview的代码:
private void openCamera(int width, int height) {
setUpCameraOutputs(width, height);
configureTransform(width, height);
Activity activity = getActivity();
CameraManager manager = (CameraManager) activity.getSystemService(Context.CAMERA_SERVICE);
try {
if (!mCameraOpenCloseLock.tryAcquire(2500, TimeUnit.MILLISECONDS)) {
throw new RuntimeException("Time out waiting to lock camera opening.");
}
manager.openCamera(mCameraId, mStateCallback, mBackgroundHandler);//根据mCameraId打开前置或者后置摄像头
//mBackgroundHandler是处理打开摄像头的线程
//mStateCallback打开摄像头后,进入这个回调函数
} catch (CameraAccessException e) {
e.printStackTrace();
} catch (InterruptedException e) {
throw new RuntimeException("Interrupted while trying to lock camera opening.", e);
}
}
private final CameraDevice.StateCallback mStateCallback = new CameraDevice.StateCallback() {
@Override
public void onOpened(CameraDevice cameraDevice) {//若成功打开,进入这个函数
// This method is called when the camera is opened. We start camera preview here.
mCameraOpenCloseLock.release();
mCameraDevice = cameraDevice;
createCameraPreviewSession();//创建显示预览界面的函数
}
//………
}
private void createCameraPreviewSession() {
try {
SurfaceTexture texture = mTextureView.getSurfaceTexture();
assert texture != null;
// We configure the size of default buffer to be the size of camera preview we want.
texture.setDefaultBufferSize(mPreviewSize.getWidth(), mPreviewSize.getHeight());
// This is the output Surface we need to start preview.
Surface surface = new Surface(texture);
// We set up a CaptureRequest.Builder with the output Surface.
mPreviewRequestBuilder
= mCameraDevice.createCaptureRequest(CameraDevice.TEMPLATE_PREVIEW);
mPreviewRequestBuilder.addTarget(surface);//target为surface,就是手机的界面
// Here, we create a CameraCaptureSession for camera preview.
mCameraDevice.createCaptureSession(Arrays.asList(surface, mImageReader.getSurface()),//拍照的session,注意这里有两个surface
//一个是手机的界面,一个是图片。
//也就是说,这个session形成的数据流,
//可以一个传向手机界面,一个形成图片
//具体看Caputre()或者SetRepeatingRequest函数里面的
//参数request的addtarget()里面的值
new CameraCaptureSession.StateCallback() {
@Override
public void onConfigured(CameraCaptureSession cameraCaptureSession) {
// The camera is already closed
if (null == mCameraDevice) {
return;
}
// When the session is ready, we start displaying the preview.
mCaptureSession = cameraCaptureSession;
try {
// Auto focus should be continuous for camera preview.
mPreviewRequestBuilder.set(CaptureRequest.CONTROL_AF_MODE,
CaptureRequest.CONTROL_AF_MODE_CONTINUOUS_PICTURE);
// Flash is automatically enabled when necessary.
mPreviewRequestBuilder.set(CaptureRequest.CONTROL_AE_MODE,
CaptureRequest.CONTROL_AE_MODE_ON_AUTO_FLASH);
// Finally, we start displaying the camera preview.
mPreviewRequest = mPreviewRequestBuilder.build();
mCaptureSession.setRepeatingRequest(mPreviewRequest,//mPreviewRequest的target是手机界面的surface,就是形成预览
//因此需要setRepeatingRequest,持续捕获帧形成视频
mCaptureCallback, mBackgroundHandler);
} catch (CameraAccessException e) {
e.printStackTrace();
}
}
//……….
}
CameraDevice.StateCallback:
当CameraDevice状态改变(打开或关闭)后调用该函数,一般在该函数执行如下功能:
创建CameraDevice.TEMPLATE_PREVIEW类型的previewRequest,设置addTarget()为preview的surface。
创建session,这个session有两个request,因此要把request的target surface都放到List中,createCaptureSession(List, CameraCaptureSession.StateCallback, Handler)中的List为preview和ImageReader的surface。CameraCaptureSession.StateCallback里面进行setRepeatingCapture(),将捕获的画面显示在preview上。mCaptureCallback说是捕获完成后的回调函数,暂不分析。
拍照(捕获静态图像)的代码:
private void captureStillPicture() {
try {
final Activity activity = getActivity();
if (null == activity || null == mCameraDevice) {
return;
}
// This is the CaptureRequest.Builder that we use to take a picture.
final CaptureRequest.Builder captureBuilder =
mCameraDevice.createCaptureRequest(CameraDevice.TEMPLATE_STILL_CAPTURE);
captureBuilder.addTarget(mImageReader.getSurface()); //target是image
// Use the same AE and AF modes as the preview.
captureBuilder.set(CaptureRequest.CONTROL_AF_MODE,
CaptureRequest.CONTROL_AF_MODE_CONTINUOUS_PICTURE);
captureBuilder.set(CaptureRequest.CONTROL_AE_MODE,
CaptureRequest.CONTROL_AE_MODE_ON_AUTO_FLASH);
// Orientation
int rotation = activity.getWindowManager().getDefaultDisplay().getRotation();
captureBuilder.set(CaptureRequest.JPEG_ORIENTATION, ORIENTATIONS.get(rotation));
CameraCaptureSession.CaptureCallback CaptureCallback
= new CameraCaptureSession.CaptureCallback() {
@Override
public void onCaptureCompleted(CameraCaptureSession session, CaptureRequest request,
TotalCaptureResult result) {
showToast("Saved: " + mFile);
unlockFocus();
}
};
mCaptureSession.stopRepeating();//停掉之前的setrepeating的持续不断的捕获
mCaptureSession.capture(captureBuilder.build(), CaptureCallback, null);//capture的时候,数据流形成image
} catch (CameraAccessException e) {
e.printStackTrace();
}
}
类似上述分析,不过此时request的类型cameraDevice.TEMPLATE_STILL_CAPTURE并且addTarget()的对象ImageReader,另外setRepeatingCapture换成了capture。即捕获一个frame,返回至ImageReader中形成图片。
三、录像流程分析(参考Camera2Video)
private void openCamera(int width, int height) {
final Activity activity = getActivity();
if (null == activity || activity.isFinishing()) {
return;
}
CameraManager manager = (CameraManager) activity.getSystemService(Context.CAMERA_SERVICE);
try {
if (!mCameraOpenCloseLock.tryAcquire(2500, TimeUnit.MILLISECONDS)) {
throw new RuntimeException("Time out waiting to lock camera opening.");
}
String cameraId = manager.getCameraIdList()[0];//后置摄像头的id
// Choose the sizes for camera preview and video recording
CameraCharacteristics characteristics = manager.getCameraCharacteristics(cameraId);
StreamConfigurationMap map = characteristics
.get(CameraCharacteristics.SCALER_STREAM_CONFIGURATION_MAP);
mVideoSize = chooseVideoSize(map.getOutputSizes(MediaRecorder.class));
mPreviewSize = chooseOptimalSize(map.getOutputSizes(SurfaceTexture.class),
width, height, mVideoSize);
int orientation = getResources().getConfiguration().orientation;
if (orientation == Configuration.ORIENTATION_LANDSCAPE) {
mTextureView.setAspectRatio(mPreviewSize.getWidth(), mPreviewSize.getHeight());
} else {
mTextureView.setAspectRatio(mPreviewSize.getHeight(), mPreviewSize.getWidth());
}
configureTransform(width, height);
mMediaRecorder = new MediaRecorder();
manager.openCamera(cameraId, mStateCallback, null);//打开相机,进入回调函数
//……
}
private CameraDevice.StateCallback mStateCallback = new CameraDevice.StateCallback() {
@Override
public void onOpened(CameraDevice cameraDevice) {
mCameraDevice = cameraDevice;
startPreview(); //进入这个函数
mCameraOpenCloseLock.release();
if (null != mTextureView) {
configureTransform(mTextureView.getWidth(), mTextureView.getHeight());
}
}
//……
}
private void startPreview() {
if (null == mCameraDevice || !mTextureView.isAvailable() || null == mPreviewSize) {
return;
}
try {
setUpMediaRecorder();//设置mediarecoder的参数,具体的介绍看android developer文档
SurfaceTexture texture = mTextureView.getSurfaceTexture();
assert texture != null;
texture.setDefaultBufferSize(mPreviewSize.getWidth(), mPreviewSize.getHeight());
mPreviewBuilder = mCameraDevice.createCaptureRequest(CameraDevice.TEMPLATE_RECORD);//此时request的参数是record
List<Surface> surfaces = new ArrayList<Surface>();
Surface previewSurface = new Surface(texture);
surfaces.add(previewSurface);
mPreviewBuilder.addTarget(previewSurface);//target是预览界面
Surface recorderSurface = mMediaRecorder.getSurface();
surfaces.add(recorderSurface);
mPreviewBuilder.addTarget(recorderSurface);//target是mediarecorder
mCameraDevice.createCaptureSession(surfaces, new CameraCaptureSession.StateCallback() {
@Override
public void onConfigured(CameraCaptureSession cameraCaptureSession) {
mPreviewSession = cameraCaptureSession;
updatePreview();//进入这个函数
}
//……….
}, mBackgroundHandler);}
//此为mediaRecoder的设置,具体见MediaRecorder
private void setUpMediaRecorder() throws IOException {
final Activity activity = getActivity();
if (null == activity) {
return;
}
mMediaRecorder.setAudioSource(MediaRecorder.AudioSource.MIC);
mMediaRecorder.setVideoSource(MediaRecorder.VideoSource.SURFACE);
mMediaRecorder.setOutputFormat(MediaRecorder.OutputFormat.MPEG_4);
mMediaRecorder.setOutputFile(getVideoFile(activity).getAbsolutePath());
mMediaRecorder.setVideoEncodingBitRate(10000000);
mMediaRecorder.setVideoFrameRate(30);
mMediaRecorder.setVideoSize(mVideoSize.getWidth(), mVideoSize.getHeight());
mMediaRecorder.setVideoEncoder(MediaRecorder.VideoEncoder.H264);
mMediaRecorder.setAudioEncoder(MediaRecorder.AudioEncoder.AAC);
int rotation = activity.getWindowManager().getDefaultDisplay().getRotation();
int orientation = ORIENTATIONS.get(rotation);
mMediaRecorder.setOrientationHint(orientation);
mMediaRecorder.prepare();
}
private void updatePreview() {
if (null == mCameraDevice) {
return;
}
try {
setUpCaptureRequestBuilder(mPreviewBuilder);
mPreviewSession.setRepeatingRequest(mPreviewBuilder.build(), null, mBackgroundHandler);//session发送请求,持续捕获帧
} catch (CameraAccessException e) {
e.printStackTrace();
}
}
//进行上面设置之后,点击button,执行startRecordingVideo()函数,mMediaRecorder.start();开始录制视频
private void startRecordingVideo() {
try {
// UI
mButtonVideo.setText(R.string.stop);
mIsRecordingVideo = true;
// Start recording
mMediaRecorder.start();
} catch (IllegalStateException e) {
e.printStackTrace();
}
}
//再次点击button,停止录制。源代码会出现一些问题,应该先关闭capture之后再停止录制,具体问题在stackoverflow里面有写。
private void stopRecordingVideo() {
// UI
mIsRecordingVideo = false;
mButtonVideo.setText(R.string.record);
//modifying!!!!~~~~~android官方的demo里面在停止拍摄的时候会卡,所以改了一点
try {
// Abort all pending captures.
cameraCaptureSession.abortCaptures();
} catch (CameraAccessException e) {
e.printStackTrace();
}
// Stop recording
mMediaRecorder.stop();
mMediaRecorder.reset();
Activity activity = getActivity();
if (null != activity) {
Toast.makeText(activity, "Video saved: " + getVideoFile(activity),
Toast.LENGTH_SHORT).show();
}
startPreview();//最后执行这个函数,重新开始预览,准备录制视频
}
}
在Camera2Video中:只创建了一个session,一个request有两个target surface-MediaRecorder和Preview。SetRepeatingRequest()不停的捕获画面一方面显示在preview上,另一方面形成视频流。当MediaRecorder.start()时,开始录制,之前SetRepeatingRequest的帧(frame)抛弃掉,从start开始帧输出到指定的文件中。
我们今天的关于Android 5,camera2仅使用闪光灯和android调用闪光灯的分享就到这里,谢谢您的阅读,如果想了解更多关于Android 7.1 Camera2 拍照镜像分析、Android : Camera2/HAL3 框架分析、android Camera2 API使用详解、android camera2 API流程分析的相关信息,可以在本站进行搜索。
本文标签:




