如果您对androidhal诠释感兴趣,那么本文将是一篇不错的选择,我们将为您详在本文中,您将会了解到关于androidhal诠释的详细内容,我们还将为您解答androidhaxm的相关问题,并且为您
如果您对android hal 诠释感兴趣,那么本文将是一篇不错的选择,我们将为您详在本文中,您将会了解到关于android hal 诠释的详细内容,我们还将为您解答android haxm的相关问题,并且为您提供关于Android - 硬件抽象层(HAL)、Android 8.0 系统源码分析 --openCamera(HAL)启动过程源码分析、Android : Camera 之 camx hal 架构、Android Automotive types.hal 更改未自动生成的有价值信息。
本文目录一览:- android hal 诠释(android haxm)
- Android - 硬件抽象层(HAL)
- Android 8.0 系统源码分析 --openCamera(HAL)启动过程源码分析
- Android : Camera 之 camx hal 架构
- Android Automotive types.hal 更改未自动生成
")
android hal 诠释(android haxm)
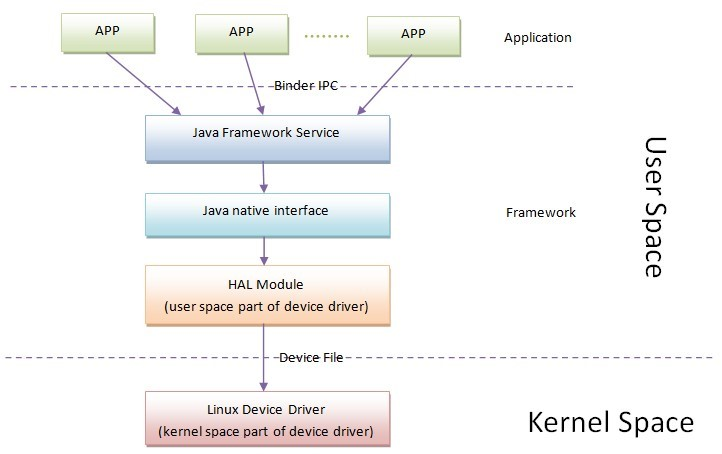
历史原因使 Android 系统有了 HAL,它的角色相当于一个中间人,对上层,它负责给 JNI 提供调用 kernel 的方法,对下层,它所提供的方法包含能够访问 kernel 的函数,即 kernel 提供给上层的 API,如:open、read、write、ioctl 等;
下面,我们通过对比 Android 系统架构和 Linux 系统架构来增加理解:
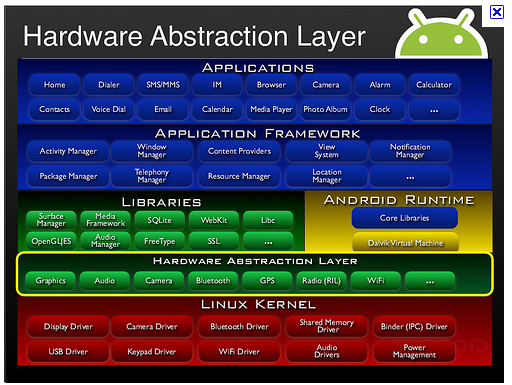
Android 系统架构(HAL)

Android 系统架构(无 HAL)
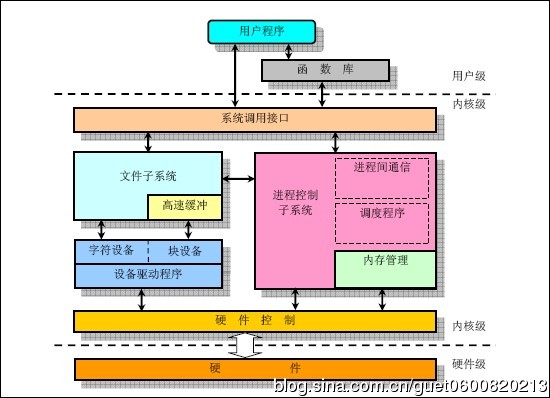
Linux 系统架构
补充一下基础概念:所谓的 API 函数,被包含在用户层的函数库中,API 对 kernel 是产生系统调用,对用户程序是提供产生系统调用的方法;所谓的接口,是对外公开声明的函数、变量,即汇编语言中所说的标号或符号,外部程序通过接口可以引用某些自己不具备的服务
1、Linux 系统架构
Android 是基于 Linux 的扩展,所以我们先来看一下 Linux 系统架构;
从软件架构的角度来看,Linux 分为 user 层、kernel 层,这两层是 C 实现的(应用层还可用 C++ 实现);
从系统服务流程的角度来看,Linux 有调用服务的 user 层、执行系统调用的服务层、支持系统调用的内核函数(服务模块);
所以,在 Linux 系统中访问设备的流程为:用户层程序直接产生系统调用(系统开发人员)或者通过 API 函数间接产生系统调用陷入 kernel 层,在 kernel 层找到用户程序所需的服务,这里说的是访问设备,则找的是 device driver,通过 device driver 最终实现对硬件设备的访问;
以代码示意整个流程:
---------------------------------------------------------------
main()
{
operation();
extern system_call();
operation()
{
system_call();
---------------------------------------------------------------
kernel 层
system_call()
{
datatype (*system_service)();
system_service = find_sys_service();
system_service();
}
device_operateion() // this is one of system service module functions(methods)
{
}
---------------------------------------------------------------
device 硬件层
---------------------------------------------------------------
2、Android 系统架构
从 Android 系统架构(无 HAL)框图可知,Android 系统架构比 Linux 系统架构多了 Application、Application Framework 两层,这就是 android 的应用层(JAVA);
Android 将 Linux 的应用层(用户 C 程序 + 函数库)添加一个 Android Runtime 作为其中间层,并将中间层和 kernel 层统称 Android 的系统层(C/C++);
HAL 所调用的 API 来自 Libraries,真正能和 kernel 打交道的是 API,所以,Android 系统架构(HAL)框图并不准确,HAL 并非一个独立的具有隔离作用的层,而是从某方面性质上宣称它是一个 Layer,其实它相当于 Linux 系统中的用户 C 程序组,只是它不仅要完成在 Linux 系统中用户 C 程序所要完成的工作,还要向上给 JNI 提供完成这些工作的接口,实现从 JAVA 调用 C 获取 kernel 系统服务的机制;因此,我个人认为 Android 系统架构(无 HAL)框图更为恰当,HAL 的存在只是为了在概念上更好的表述和理解 Android 系统而已;
Android 的整个系统服务调用流程我只从 HAL 开始往下较为清晰,对 JNI 方法有初步了解,尚未完全清晰理解,JAVA 层则几乎未涉及,此次学习只能暂时到此为止了!
")
Android - 硬件抽象层(HAL)
- 内核空间主要负责硬件访问逻辑(GPL)
- 用户空间主要负责参数和访问流程控制(Apache License)
Android 硬件驱动程序验证
Android 硬件抽象层模块开发
启动过程源码分析")
Android 8.0 系统源码分析 --openCamera(HAL)启动过程源码分析
前面我们详细分析了从应用层调用 CameraManager 的 openCamera 的方法来打开相机的逻辑,上次的分析我们来到了 CameraServer 进程当中,但是还没有真正看到 open 操作设备节点来实现真正打开的逻辑,遗留的问题也就是从 frameworks\av\services\camera\libcameraservice\device3\Camera3Device.cpp 文件中的 status_t Camera3Device::initialize (sp<CameraProviderManager> manager) 方法的 status_t res = manager->openSession (mId.string (), this, /*out*/ &session); 这句代码进去后进行的处理。
我们知道,Android 的内核是 Linux 内核,Linux 上所有的设备都被抽象成文件节点,对设备的操作都变成了对文件节点的操作,非常方便,我们 openCamera 的逻辑最终肯定也是通过 open 系统函数来打开 camera 的文件节点,而 open 系统调用的处理就是对应的 camera 驱动了。
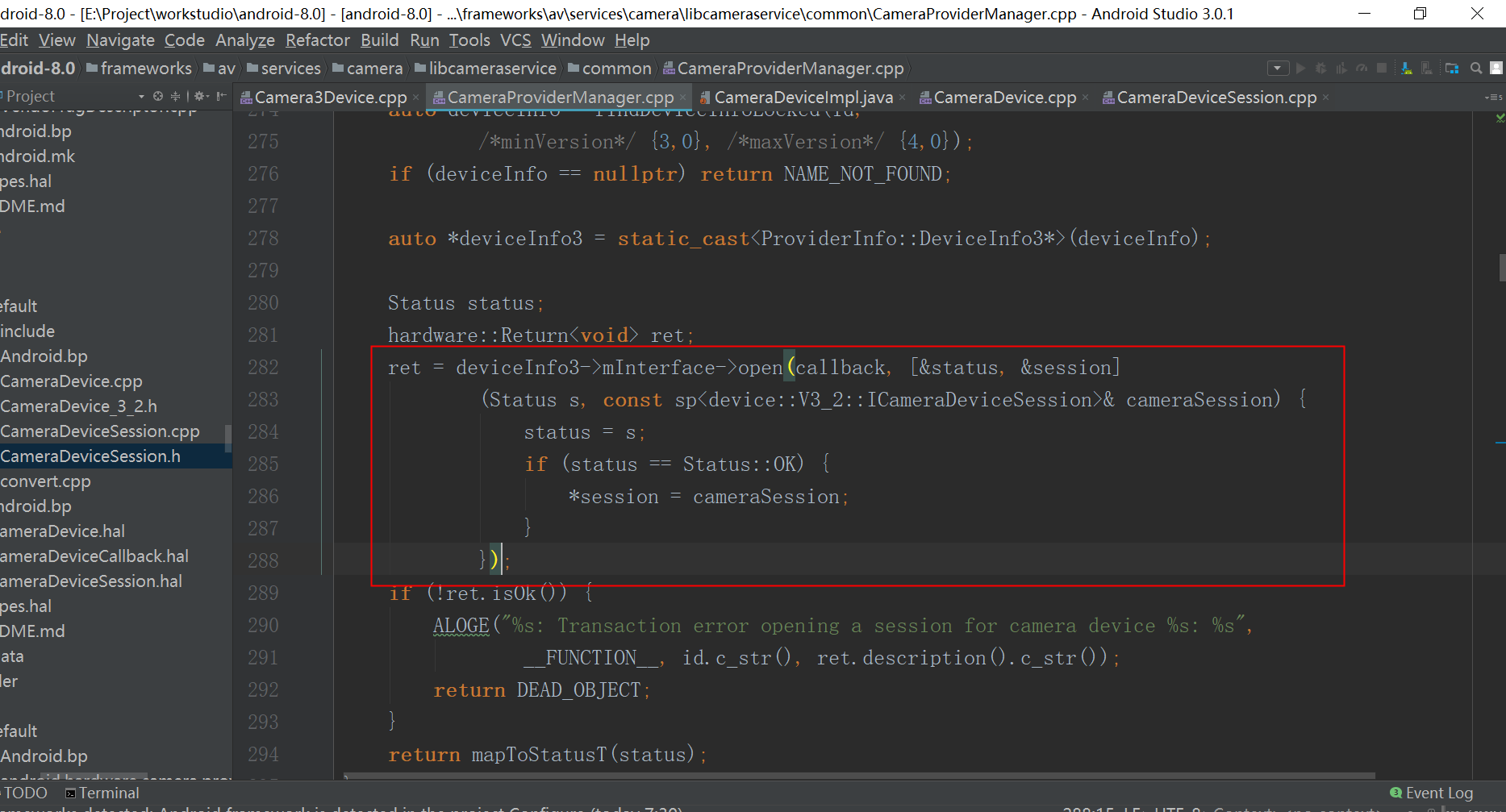
好,我们回到正文,status_t res = manager->openSession (mId.string (), this, /*out*/ &session); 这句逻辑中的 manager 是一个 sp<CameraProviderManager > 对象,那我们就来看一下 frameworks\av\services\camera\libcameraservice\common\CameraProviderManager.cpp 文件中的 openSession 方法的实现,源码如下:
status_t CameraProviderManager::openSession(const std::string &id,
const sp<hardware::camera::device::V3_2::ICameraDeviceCallback>& callback,
/*out*/
sp<hardware::camera::device::V3_2::ICameraDeviceSession> *session) {
std::lock_guard<std::mutex> lock(mInterfaceMutex);
auto deviceInfo = findDeviceInfoLocked(id,
/*minVersion*/ {3,0}, /*maxVersion*/ {4,0});
if (deviceInfo == nullptr) return NAME_NOT_FOUND;
auto *deviceInfo3 = static_cast<ProviderInfo::DeviceInfo3*>(deviceInfo);
Status status;
hardware::Return<void> ret;
ret = deviceInfo3->mInterface->open(callback, [&status, &session]
(Status s, const sp<device::V3_2::ICameraDeviceSession>& cameraSession) {
status = s;
if (status == Status::OK) {
*session = cameraSession;
}
});
if (!ret.isOk()) {
ALOGE("%s: Transaction error opening a session for camera device %s: %s",
__FUNCTION__, id.c_str(), ret.description().c_str());
return DEAD_OBJECT;
}
return mapToStatusT(status);
}
该方法中根据传入的最小和最大版本号调用 findDeviceInfoLocked 方法获取到一个 DeviceInfo 对象,其中的逻辑比较简单,源码如下:
CameraProviderManager::ProviderInfo::DeviceInfo* CameraProviderManager::findDeviceInfoLocked(
const std::string& id,
hardware::hidl_version minVersion, hardware::hidl_version maxVersion) const {
for (auto& provider : mProviders) {
for (auto& deviceInfo : provider->mDevices) {
if (deviceInfo->mId == id &&
minVersion <= deviceInfo->mVersion && maxVersion >= deviceInfo->mVersion) {
return deviceInfo.get();
}
}
}
return nullptr;
}
可以看到,该方法的逻辑就是对成员变量 mProviders 进行遍历,判断每个 DeviceInfo 的 id 值、最小版本、最大版本号是否符合传入的最小和最大版本,符合的话,就返回该对象,那我们就要问一下了,mProviders 中的值是什么时候添加的呢?我们大概追究一下,它是在 CameraService 进行启动时,初始化 CameraProviderManager 对象的逻辑中,通过 addProviderLocked 方法生成具体的 DeviceInfo 对象,添加到 mProviders 成员变量中的。addProviderLocked 方法的源码如下:
status_t CameraProviderManager::addProviderLocked(const std::string& newProvider, bool expected) {
for (const auto& providerInfo : mProviders) {
if (providerInfo->mProviderName == newProvider) {
ALOGW("%s: Camera provider HAL with name ''%s'' already registered", __FUNCTION__,
newProvider.c_str());
return ALREADY_EXISTS;
}
}
sp<provider::V2_4::ICameraProvider> interface;
interface = mServiceProxy->getService(newProvider);
if (interface == nullptr) {
if (expected) {
ALOGE("%s: Camera provider HAL ''%s'' is not actually available", __FUNCTION__,
newProvider.c_str());
return BAD_VALUE;
} else {
return OK;
}
}
sp<ProviderInfo> providerInfo =
new ProviderInfo(newProvider, interface, this);
status_t res = providerInfo->initialize();
if (res != OK) {
return res;
}
mProviders.push_back(providerInfo);
return OK;
}
这个方法中有一个非常重要的对象,就是 interface = mServiceProxy->getService (newProvider) 逻辑返回的 interface,它又是一个 binder 对象,获取 camera 属性、数量等实质性的方法都是通过它来完成的,获取成功后,以它为参数构造一个 ProviderInfo 对象,最后添加到 mProviders 成员变量当中。
好了,我们回到 openSession 方法当中,找到 deviceInfo 对象之后,然后调用 deviceInfo3->mInterface->open,而它的成员变量 mInterface 就是在前面我们说构造 ProviderInfo 时获取到的 binder 对象了,它实际上是 hardware\interfaces\camera\device\3.2\default\CameraDevice.cpp 对象了,来到这里,我们就进入了 CameraDaemon 进程当中,两个进程的通信是通过 HIDL,其实还是 binder 进程间通信机制,只是它是用来提供给 HAL 层服务的,所以和 AIDL 类似,取了个 HIDL 的名字。这里需要说一下,为是什么是 3.2 下面的这个类呢?因为我们在调用 openSession 方法时,传入的第二个参数 const sp<hardware::camera::device::V3_2::ICameraDeviceCallback>& callback 和第三个参数 sp<hardware::camera::device::V3_2::ICameraDeviceSession> *session 就可以非常明显的看出来,当前调用的版本是 V3_2。接下来,我们就来看一下 CameraDevice.cpp 类的 open 方法的实现,源码如下:
Return<void> CameraDevice::open(const sp<ICameraDeviceCallback>& callback, open_cb _hidl_cb) {
Status status = initStatus();
sp<CameraDeviceSession> session = nullptr;
if (callback == nullptr) {
ALOGE("%s: cannot open camera %s. callback is null!",
__FUNCTION__, mCameraId.c_str());
_hidl_cb(Status::ILLEGAL_ARGUMENT, session);
return Void();
}
if (status != Status::OK) {
// Provider will never pass initFailed device to client, so
// this must be a disconnected camera
ALOGE("%s: cannot open camera %s. camera is disconnected!",
__FUNCTION__, mCameraId.c_str());
_hidl_cb(Status::CAMERA_DISCONNECTED, session);
return Void();
} else {
mLock.lock();
ALOGV("%s: Initializing device for camera %d", __FUNCTION__, mCameraIdInt);
session = mSession.promote();
if (session != nullptr && !session->isClosed()) {
ALOGE("%s: cannot open an already opened camera!", __FUNCTION__);
mLock.unlock();
_hidl_cb(Status::CAMERA_IN_USE, nullptr);
return Void();
}
/** Open HAL device */
status_t res;
camera3_device_t *device;
ATRACE_BEGIN("camera3->open");
res = mModule->open(mCameraId.c_str(),
reinterpret_cast<hw_device_t**>(&device));
ATRACE_END();
if (res != OK) {
ALOGE("%s: cannot open camera %s!", __FUNCTION__, mCameraId.c_str());
mLock.unlock();
_hidl_cb(getHidlStatus(res), nullptr);
return Void();
}
/** Cross-check device version */
if (device->common.version < CAMERA_DEVICE_API_VERSION_3_2) {
ALOGE("%s: Could not open camera: "
"Camera device should be at least %x, reports %x instead",
__FUNCTION__,
CAMERA_DEVICE_API_VERSION_3_2,
device->common.version);
device->common.close(&device->common);
mLock.unlock();
_hidl_cb(Status::ILLEGAL_ARGUMENT, nullptr);
return Void();
}
struct camera_info info;
res = mModule->getCameraInfo(mCameraIdInt, &info);
if (res != OK) {
ALOGE("%s: Could not open camera: getCameraInfo failed", __FUNCTION__);
device->common.close(&device->common);
mLock.unlock();
_hidl_cb(Status::ILLEGAL_ARGUMENT, nullptr);
return Void();
}
session = new CameraDeviceSession(
device, info.static_camera_characteristics, callback);
if (session == nullptr) {
ALOGE("%s: camera device session allocation failed", __FUNCTION__);
mLock.unlock();
_hidl_cb(Status::INTERNAL_ERROR, nullptr);
return Void();
}
if (session->isInitFailed()) {
ALOGE("%s: camera device session init failed", __FUNCTION__);
session = nullptr;
mLock.unlock();
_hidl_cb(Status::INTERNAL_ERROR, nullptr);
return Void();
}
mSession = session;
mLock.unlock();
}
_hidl_cb(status, session);
return Void();
}
我们先来看一下该方法的参数,第一个是 callback 对象,它的使用方法和我们之前讲的应用层调用 openCamera 时在 CameraManager 中传入的 binder 类型的 callback 是一样的,Server 端拿到这个 callback 之后,就可以针对需要的节点事件回调应用层,而这里是在 CameraDaemon 回调 CameraServer,道理是一样的。这个 callback 参数最终赋值给 HAL 层中的 CameraDeviceSession 类的 mResultBatcher 成员变量了;第二个参数是 open_cb 类型,从它的命名中可以看出来,它也是一个回调函数,非常方便,就像一个函数指针一样,它在 CameraProviderManager 一侧中像一个结构体一样传了过来,当 CameraDevice 类中的 open 执行完成后,就会将 session 对象作为参数回传到 CameraProviderManager 这一侧,我们就拿到了 session,后续对 camera 的操作都是通过这个 sesson 对象来进行中转完成的。CameraProviderManager 这一侧传入的结构体如下:
我们继续阅读代码,open 方法中先判断 status,正常的话,接着调用 res = mModule->open (mCameraId.c_str (), reinterpret_cast<hw_device_t**>(&device)) 来执行相机的打开操作,mModule 对象是 CameraDevice 类的成员变量,它是在 CameraDevice 的构造函数中传入的,而 CameraDevice 类的对象是在 hardware\interfaces\camera\provider\2.4\default\CameraProvider.cpp 文件中的 getCameraDeviceInterface_V3_x 方法中构造的,该方法也是 CameraDaemon 进程为 CameraServer 进程提供的,当添加相机设备时,CameraServer 就需要查询和获取 camera 设备,也就会使用到这个接口,getCameraDeviceInterface_V3_x 方法源码如下:
Return<void> CameraProvider::getCameraDeviceInterface_V3_x(
const hidl_string& cameraDeviceName, getCameraDeviceInterface_V3_x_cb _hidl_cb) {
std::string cameraId, deviceVersion;
bool match = matchDeviceName(cameraDeviceName, &deviceVersion, &cameraId);
if (!match) {
_hidl_cb(Status::ILLEGAL_ARGUMENT, nullptr);
return Void();
}
std::string deviceName(cameraDeviceName.c_str());
ssize_t index = mCameraDeviceNames.indexOf(std::make_pair(cameraId, deviceName));
if (index == NAME_NOT_FOUND) { // Either an illegal name or a device version mismatch
Status status = Status::OK;
ssize_t idx = mCameraIds.indexOf(cameraId);
if (idx == NAME_NOT_FOUND) {
ALOGE("%s: cannot find camera %s!", __FUNCTION__, cameraId.c_str());
status = Status::ILLEGAL_ARGUMENT;
} else { // invalid version
ALOGE("%s: camera device %s does not support version %s!",
__FUNCTION__, cameraId.c_str(), deviceVersion.c_str());
status = Status::OPERATION_NOT_SUPPORTED;
}
_hidl_cb(status, nullptr);
return Void();
}
if (mCameraStatusMap.count(cameraId) == 0 ||
mCameraStatusMap[cameraId] != CAMERA_DEVICE_STATUS_PRESENT) {
_hidl_cb(Status::ILLEGAL_ARGUMENT, nullptr);
return Void();
}
sp<android::hardware::camera::device::V3_2::implementation::CameraDevice> device =
new android::hardware::camera::device::V3_2::implementation::CameraDevice(
mModule, cameraId, mCameraDeviceNames);
if (device == nullptr) {
ALOGE("%s: cannot allocate camera device for id %s", __FUNCTION__, cameraId.c_str());
_hidl_cb(Status::INTERNAL_ERROR, nullptr);
return Void();
}
if (device->isInitFailed()) {
ALOGE("%s: camera device %s init failed!", __FUNCTION__, cameraId.c_str());
device = nullptr;
_hidl_cb(Status::INTERNAL_ERROR, nullptr);
return Void();
}
_hidl_cb (Status::OK, device);
return Void();
}
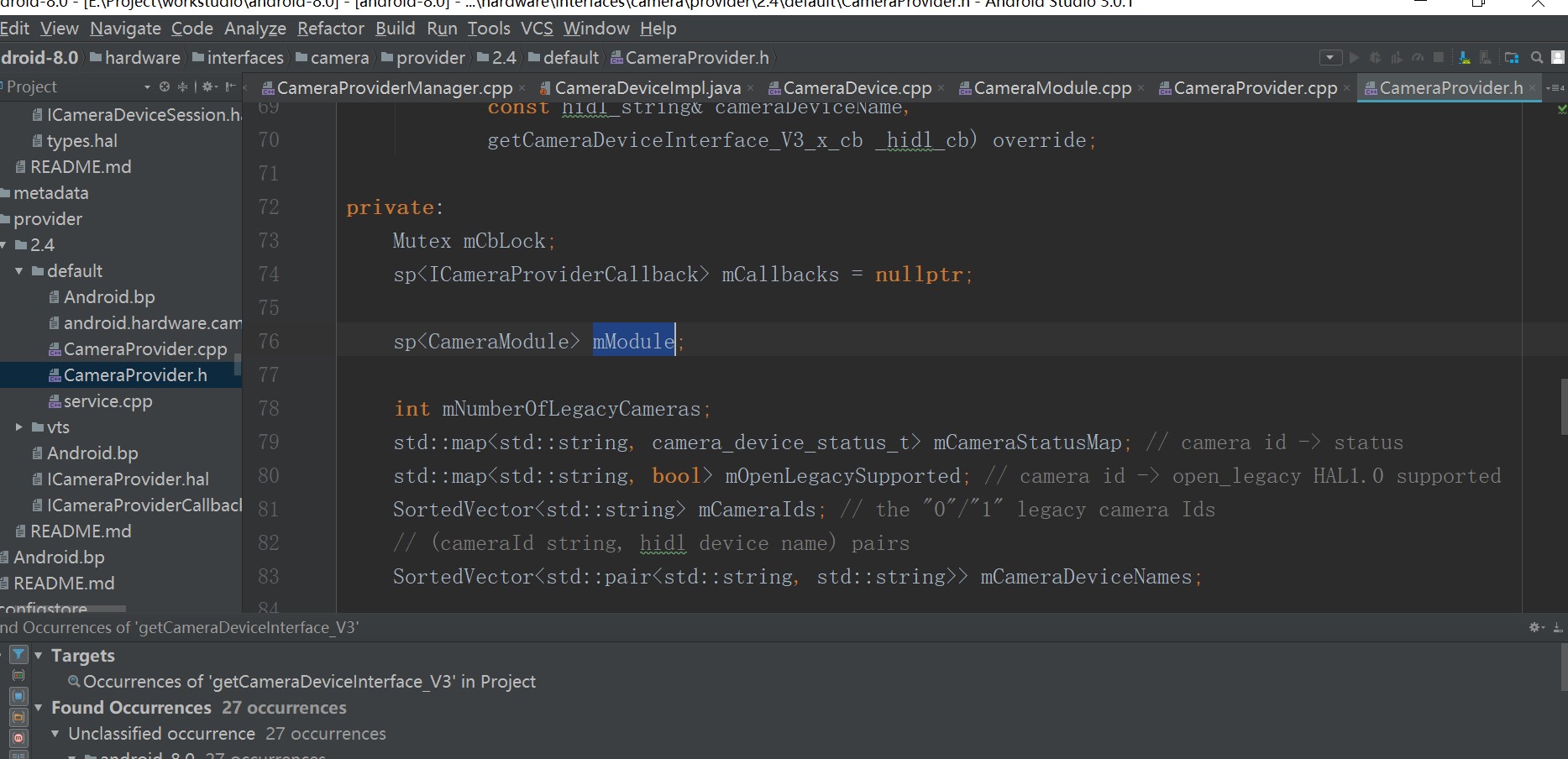
可以看到,在构造 CameraDevice 对象时,传入的第一个参数 mModule,它也是 CameraProvider 类的成员变量,它的定义在 hardware\interfaces\camera\provider\2.4\default\CameraProvider.h 头文件中,源码如下:
它是一个 CameraModule 对象,那么我们接下来就看看 hardware\interfaces\camera\common\1.0\default\CameraModule.cpp 类的 open 方法,来看看它是如何处理的。它的 open 方法源码如下:
int CameraModule::open(const char* id, struct hw_device_t** device) {
int res;
ATRACE_BEGIN("camera_module->open");
res = filterOpenErrorCode(mModule->common.methods->open(&mModule->common, id, device));
ATRACE_END();
return res;
}
该方法非常简洁,就是调用 mModule 类的 common.methods 的 open 方法处理,它的 mModule 也是在 CameraModule 类的构造函数中传入的,而 CameraModule 的构造方法是在 CameraProvider 类的 initialize () 方法中调用的,源码如下:
bool CameraProvider::initialize() {
camera_module_t *rawModule;
int err = hw_get_module(CAMERA_HARDWARE_MODULE_ID,
(const hw_module_t **)&rawModule);
if (err < 0) {
ALOGE("Could not load camera HAL module: %d (%s)", err, strerror(-err));
return true;
}
mModule = new CameraModule(rawModule);
err = mModule->init();
if (err != OK) {
ALOGE("Could not initialize camera HAL module: %d (%s)", err, strerror(-err));
mModule.clear();
return true;
}
ALOGI("Loaded \"%s\" camera module", mModule->getModuleName());
// Setup vendor tags here so HAL can setup vendor keys in camera characteristics
VendorTagDescriptor::clearGlobalVendorTagDescriptor();
if (!setUpVendorTags()) {
ALOGE("%s: Vendor tag setup failed, will not be available.", __FUNCTION__);
}
// Setup callback now because we are going to try openLegacy next
err = mModule->setCallbacks(this);
if (err != OK) {
ALOGE("Could not set camera module callback: %d (%s)", err, strerror(-err));
mModule.clear();
return true;
}
mNumberOfLegacyCameras = mModule->getNumberOfCameras();
for (int i = 0; i < mNumberOfLegacyCameras; i++) {
struct camera_info info;
auto rc = mModule->getCameraInfo(i, &info);
if (rc != NO_ERROR) {
ALOGE("%s: Camera info query failed!", __func__);
mModule.clear();
return true;
}
if (checkCameraVersion(i, info) != OK) {
ALOGE("%s: Camera version check failed!", __func__);
mModule.clear();
return true;
}
char cameraId[kMaxCameraIdLen];
snprintf(cameraId, sizeof(cameraId), "%d", i);
std::string cameraIdStr(cameraId);
mCameraStatusMap[cameraIdStr] = CAMERA_DEVICE_STATUS_PRESENT;
mCameraIds.add(cameraIdStr);
// initialize mCameraDeviceNames and mOpenLegacySupported
mOpenLegacySupported[cameraIdStr] = false;
int deviceVersion = mModule->getDeviceVersion(i);
mCameraDeviceNames.add(
std::make_pair(cameraIdStr,
getHidlDeviceName(cameraIdStr, deviceVersion)));
if (deviceVersion >= CAMERA_DEVICE_API_VERSION_3_2 &&
mModule->isOpenLegacyDefined()) {
// try open_legacy to see if it actually works
struct hw_device_t* halDev = nullptr;
int ret = mModule->openLegacy(cameraId, CAMERA_DEVICE_API_VERSION_1_0, &halDev);
if (ret == 0) {
mOpenLegacySupported[cameraIdStr] = true;
halDev->close(halDev);
mCameraDeviceNames.add(
std::make_pair(cameraIdStr,
getHidlDeviceName(cameraIdStr, CAMERA_DEVICE_API_VERSION_1_0)));
} else if (ret == -EBUSY || ret == -EUSERS) {
// Looks like this provider instance is not initialized during
// system startup and there are other camera users already.
// Not a good sign but not fatal.
ALOGW("%s: open_legacy try failed!", __FUNCTION__);
}
}
}
return false; // mInitFailed
}
这里构造 CameraModule 时传入的参数 rawModule 就是在该方法一开始时,通过调用 int err = hw_get_module (CAMERA_HARDWARE_MODULE_ID, (const hw_module_t **)&rawModule) 获取到的,看到这里大家是不是觉得有些熟悉,CAMERA_HARDWARE_MODULE_ID 就是 HAL 层定义的 module,从这里往下就和对应的设备厂商有密切关系了,当然具体的实现也就差别很大了,而不像我们前面到这里,不分厂商,所有设备,只要是 android 都是通用的。好了,我这里下载的 8.0 源码中提供了三个厂商的实现,分别命名为 google、huawei、lge,截图如下:
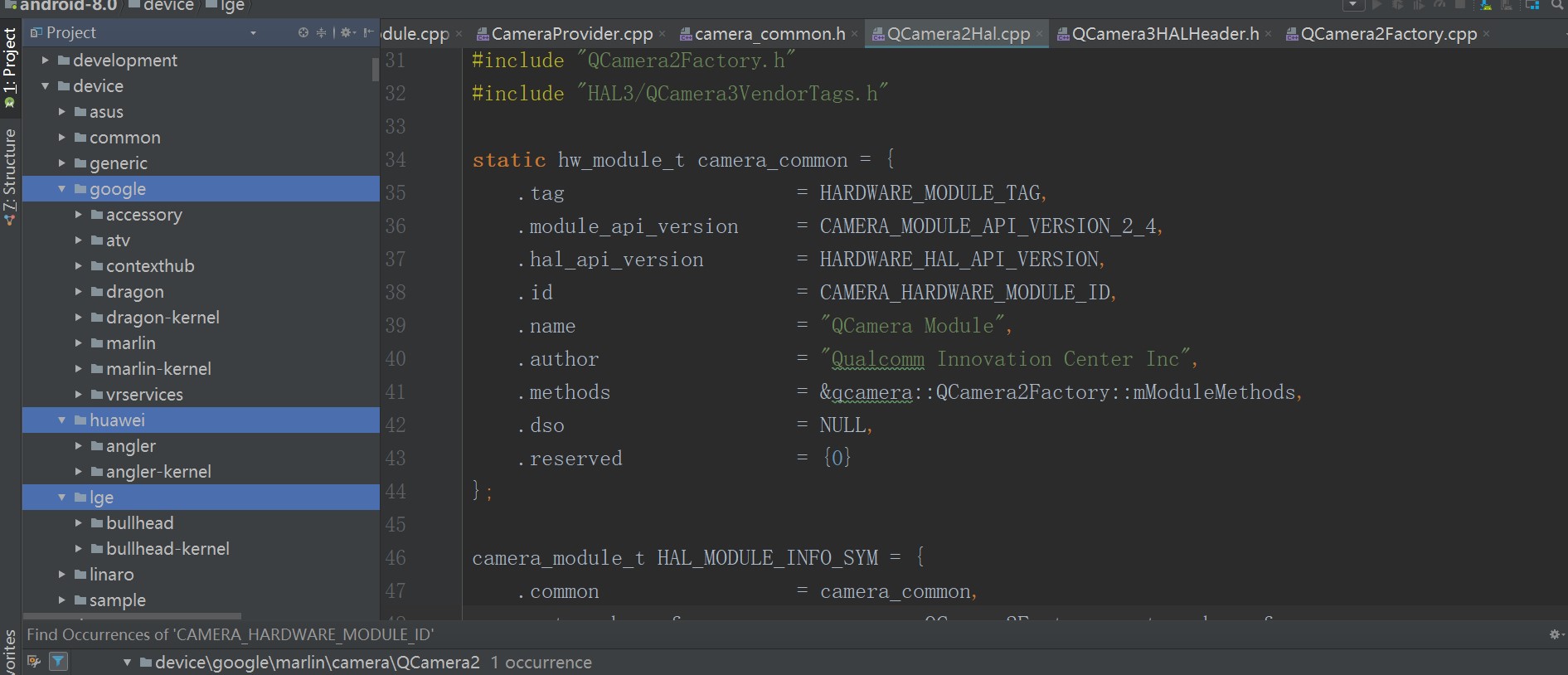
google 目录下具体的实现使用的是高通的设备,我们就来看看这个是怎么实现的。高通相机中的 hw_module_t、camera_module_t 两个结构体定义在 device\google\marlin\camera\QCamera2\QCamera2Hal.cpp 文件中,在 CameraProvider 类的 initialize () 方法中调用 hw_get_module 获取到的就是这里定义的 camera_module_t,它也就是构造 CameraModule 时传入的参数,好了,回到 CameraModule 类的 open 方法中,继续调用它的 common(这里就是 camera_module_t 结构体的第一个成员变量 common 了,它指向 camera_common 结构体)的 methods(就是 static hw_module_t camera_common 结构体的倒数第三个属性 methods 了,它指向 & qcamera::QCamera2Factory::mModuleMethods)的 open 方法,我们还是以 goole 目录下高通的实现为例,继续看一下 QCamera2Factory 类的 mModuleMethods 的定义,device\google\marlin\camera\QCamera2\QCamera2Factory.cpp 文件中的 mModuleMethods 定义源码如下:
struct hw_module_methods_t QCamera2Factory::mModuleMethods = {
.open = QCamera2Factory::camera_device_open,
};
这里的 open 又指向了 QCamera2Factory 类的 camera_device_open 方法,该方法的源码如下:
int QCamera2Factory::camera_device_open(
const struct hw_module_t *module, const char *id,
struct hw_device_t **hw_device)
{
int rc = NO_ERROR;
if (module != &HAL_MODULE_INFO_SYM.common) {
LOGE("Invalid module. Trying to open %p, expect %p",
module, &HAL_MODULE_INFO_SYM.common);
return INVALID_OPERATION;
}
if (!id) {
LOGE("Invalid camera id");
return BAD_VALUE;
}
if(gQCameraMuxer)
rc = gQCameraMuxer->camera_device_open(module, id, hw_device);
else
rc = gQCamera2Factory->cameraDeviceOpen(atoi(id), hw_device);
return rc;
}
这里先判断成员变量 gQCameraMuxer 是否为空,它是在 QCamera2Factory 类的构造函数中,判断如果当前为双摄(bDualCamera 为 true,它是通过配置项 persist.camera.dual.camera 获取的)的情况下获取的,这里我们假设它不为空,那么就调用 rc = gQCameraMuxer->camera_device_open (module, id, hw_device) 来继续打开 camera,gQCameraMuxer 的类型为 QCameraMuxer,接下来看一下 device\google\marlin\camera\QCamera2\HAL\QCameraMuxer.cpp 类中的 camera_device_open 方法的实现,源码如下:
int QCameraMuxer::camera_device_open(
__unused const struct hw_module_t *module, const char *id,
struct hw_device_t **hw_device)
{
int rc = NO_ERROR;
LOGH("id= %d",atoi(id));
if (!id) {
LOGE("Invalid camera id");
return BAD_VALUE;
}
rc = gMuxer->cameraDeviceOpen(atoi(id), hw_device);
LOGH("id= %d, rc: %d", atoi(id), rc);
return rc;
}
该方法的逻辑也非常简洁,参数正确,就接着调用 gMuxer 变量的 cameraDeviceOpen 方法来处理,gMuxer 就是当前类的实例,它的 cameraDeviceOpen 方法的源码如下:
int QCameraMuxer::cameraDeviceOpen(int camera_id,
struct hw_device_t **hw_device)
{
int rc = NO_ERROR;
uint32_t phyId = 0;
qcamera_logical_descriptor_t *cam = NULL;
if (camera_id < 0 || camera_id >= m_nLogicalCameras) {
LOGE("Camera id %d not found!", camera_id);
return -ENODEV;
}
if ( NULL == m_pLogicalCamera) {
LOGE("Hal descriptor table is not initialized!");
return NO_INIT;
}
char prop[PROPERTY_VALUE_MAX];
property_get("persist.camera.dc.frame.sync", prop, "1");
m_bFrameSyncEnabled = atoi(prop);
// Get logical camera
cam = &m_pLogicalCamera[camera_id];
if (m_pLogicalCamera[camera_id].device_version ==
CAMERA_DEVICE_API_VERSION_1_0) {
// HW Dev Holders
hw_device_t *hw_dev[cam->numCameras];
if (m_pPhyCamera[cam->pId[0]].type != CAM_TYPE_MAIN) {
LOGE("Physical camera at index 0 is not main!");
return UNKNOWN_ERROR;
}
// Open all physical cameras
for (uint32_t i = 0; i < cam->numCameras; i++) {
phyId = cam->pId[i];
QCamera2HardwareInterface *hw =
new QCamera2HardwareInterface((uint32_t)phyId);
if (!hw) {
LOGE("Allocation of hardware interface failed");
return NO_MEMORY;
}
hw_dev[i] = NULL;
// Make Camera HWI aware of its mode
cam_sync_related_sensors_event_info_t info;
info.sync_control = CAM_SYNC_RELATED_SENSORS_ON;
info.mode = m_pPhyCamera[phyId].mode;
info.type = m_pPhyCamera[phyId].type;
rc = hw->setRelatedCamSyncInfo(&info);
hw->setFrameSyncEnabled(m_bFrameSyncEnabled);
if (rc != NO_ERROR) {
LOGE("setRelatedCamSyncInfo failed %d", rc);
delete hw;
return rc;
}
rc = hw->openCamera(&hw_dev[i]);
if (rc != NO_ERROR) {
delete hw;
return rc;
}
hw->getCameraSessionId(&m_pPhyCamera[phyId].camera_server_id);
m_pPhyCamera[phyId].dev = reinterpret_cast<camera_device_t*>(hw_dev[i]);
m_pPhyCamera[phyId].hwi = hw;
cam->sId[i] = m_pPhyCamera[phyId].camera_server_id;
LOGH("camera id %d server id : %d hw device %x, hw %x",
phyId, cam->sId[i], hw_dev[i], hw);
}
} else {
LOGE("Device version for camera id %d invalid %d",
camera_id, m_pLogicalCamera[camera_id].device_version);
return BAD_VALUE;
}
cam->dev.common.tag = HARDWARE_DEVICE_TAG;
cam->dev.common.version = HARDWARE_DEVICE_API_VERSION(1, 0);
cam->dev.common.close = close_camera_device;
cam->dev.ops = &mCameraMuxerOps;
cam->dev.priv = (void*)cam;
*hw_device = &cam->dev.common;
return rc;
}
该方法中最重要的就是中间的 for 循环了,先构造 QCamera2HardwareInterface 对象,然后调用它的 openCamera 方法打开 camera,接下来就看一下 device\google\marlin\camera\QCamera2\HAL3\QCamera3HWI.cpp 类的 openCamera 方法的实现,源码如下:
int QCamera3HardwareInterface::openCamera(struct hw_device_t **hw_device)
{
int rc = 0;
if (mState != CLOSED) {
*hw_device = NULL;
return PERMISSION_DENIED;
}
m_perfLock.lock_acq();
LOGI("[KPI Perf]: E PROFILE_OPEN_CAMERA camera id %d",
mCameraId);
rc = openCamera();
if (rc == 0) {
*hw_device = &mCameraDevice.common;
} else
*hw_device = NULL;
m_perfLock.lock_rel();
LOGI("[KPI Perf]: X PROFILE_OPEN_CAMERA camera id %d, rc: %d",
mCameraId, rc);
if (rc == NO_ERROR) {
mState = OPENED;
}
return rc;
}
它又是转调另一个 openCamera 方法来处理的,源码如下:
int QCamera3HardwareInterface::openCamera()
{
int rc = 0;
char value[PROPERTY_VALUE_MAX];
KPI_ATRACE_CALL();
if (mCameraHandle) {
LOGE("Failure: Camera already opened");
return ALREADY_EXISTS;
}
rc = QCameraFlash::getInstance().reserveFlashForCamera(mCameraId);
if (rc < 0) {
LOGE("Failed to reserve flash for camera id: %d",
mCameraId);
return UNKNOWN_ERROR;
}
rc = camera_open((uint8_t)mCameraId, &mCameraHandle);
if (rc) {
LOGE("camera_open failed. rc = %d, mCameraHandle = %p", rc, mCameraHandle);
return rc;
}
if (!mCameraHandle) {
LOGE("camera_open failed. mCameraHandle = %p", mCameraHandle);
return -ENODEV;
}
rc = mCameraHandle->ops->register_event_notify(mCameraHandle->camera_handle,
camEvtHandle, (void *)this);
if (rc < 0) {
LOGE("Error, failed to register event callback");
/* Not closing camera here since it is already handled in destructor */
return FAILED_TRANSACTION;
}
mExifParams.debug_params =
(mm_jpeg_debug_exif_params_t *) malloc (sizeof(mm_jpeg_debug_exif_params_t));
if (mExifParams.debug_params) {
memset(mExifParams.debug_params, 0, sizeof(mm_jpeg_debug_exif_params_t));
} else {
LOGE("Out of Memory. Allocation failed for 3A debug exif params");
return NO_MEMORY;
}
mFirstConfiguration = true;
//Notify display HAL that a camera session is active.
//But avoid calling the same during bootup because camera service might open/close
//cameras at boot time during its initialization and display service will also internally
//wait for camera service to initialize first while calling this display API, resulting in a
//deadlock situation. Since boot time camera open/close calls are made only to fetch
//capabilities, no need of this display bw optimization.
//Use "service.bootanim.exit" property to know boot status.
property_get("service.bootanim.exit", value, "0");
if (atoi(value) == 1) {
pthread_mutex_lock(&gCamLock);
if (gNumCameraSessions++ == 0) {
setCameraLaunchStatus(true);
}
pthread_mutex_unlock(&gCamLock);
}
//fill the session id needed while linking dual cam
pthread_mutex_lock(&gCamLock);
rc = mCameraHandle->ops->get_session_id(mCameraHandle->camera_handle,
&sessionId[mCameraId]);
pthread_mutex_unlock(&gCamLock);
if (rc < 0) {
LOGE("Error, failed to get sessiion id");
return UNKNOWN_ERROR;
} else {
//Allocate related cam sync buffer
//this is needed for the payload that goes along with bundling cmd for related
//camera use cases
m_pRelCamSyncHeap = new QCamera3HeapMemory(1);
rc = m_pRelCamSyncHeap->allocate(sizeof(cam_sync_related_sensors_event_info_t));
if(rc != OK) {
rc = NO_MEMORY;
LOGE("Dualcam: Failed to allocate Related cam sync Heap memory");
return NO_MEMORY;
}
//Map memory for related cam sync buffer
rc = mCameraHandle->ops->map_buf(mCameraHandle->camera_handle,
CAM_MAPPING_BUF_TYPE_SYNC_RELATED_SENSORS_BUF,
m_pRelCamSyncHeap->getFd(0),
sizeof(cam_sync_related_sensors_event_info_t),
m_pRelCamSyncHeap->getPtr(0));
if(rc < 0) {
LOGE("Dualcam: failed to map Related cam sync buffer");
rc = FAILED_TRANSACTION;
return NO_MEMORY;
}
m_pRelCamSyncBuf =
(cam_sync_related_sensors_event_info_t*) DATA_PTR(m_pRelCamSyncHeap,0);
}
LOGH("mCameraId=%d",mCameraId);
return NO_ERROR;
}
这里又转调 camera_open 方法来处理,camera_open 方法的实现是在 device\google\marlin\camera\QCamera2\stack\mm-camera-interface\src\mm_camera_interface.c 文件中,源码如下:
int32_t camera_open(uint8_t camera_idx, mm_camera_vtbl_t **camera_vtbl)
{
int32_t rc = 0;
mm_camera_obj_t *cam_obj = NULL;
#ifdef QCAMERA_REDEFINE_LOG
mm_camera_set_dbg_log_properties();
#endif
LOGD("E camera_idx = %d\n", camera_idx);
if (camera_idx >= g_cam_ctrl.num_cam) {
LOGE("Invalid camera_idx (%d)", camera_idx);
return -EINVAL;
}
pthread_mutex_lock(&g_intf_lock);
/* opened already */
if(NULL != g_cam_ctrl.cam_obj[camera_idx]) {
/* Add reference */
g_cam_ctrl.cam_obj[camera_idx]->ref_count++;
pthread_mutex_unlock(&g_intf_lock);
LOGD("opened alreadyn");
*camera_vtbl = &g_cam_ctrl.cam_obj[camera_idx]->vtbl;
return rc;
}
cam_obj = (mm_camera_obj_t *)malloc(sizeof(mm_camera_obj_t));
if(NULL == cam_obj) {
pthread_mutex_unlock(&g_intf_lock);
LOGE("no mem");
return -EINVAL;
}
/* initialize camera obj */
memset(cam_obj, 0, sizeof(mm_camera_obj_t));
cam_obj->ctrl_fd = -1;
cam_obj->ds_fd = -1;
cam_obj->ref_count++;
cam_obj->my_hdl = mm_camera_util_generate_handler(camera_idx);
cam_obj->vtbl.camera_handle = cam_obj->my_hdl; /* set handler */
cam_obj->vtbl.ops = &mm_camera_ops;
pthread_mutex_init(&cam_obj->cam_lock, NULL);
/* unlock global interface lock, if not, in dual camera use case,
* current open will block operation of another opened camera obj*/
pthread_mutex_lock(&cam_obj->cam_lock);
pthread_mutex_unlock(&g_intf_lock);
rc = mm_camera_open(cam_obj);
pthread_mutex_lock(&g_intf_lock);
if (rc != 0) {
LOGE("mm_camera_open err = %d", rc);
pthread_mutex_destroy(&cam_obj->cam_lock);
g_cam_ctrl.cam_obj[camera_idx] = NULL;
free(cam_obj);
cam_obj = NULL;
pthread_mutex_unlock(&g_intf_lock);
*camera_vtbl = NULL;
return rc;
} else {
LOGD("Open succeded\n");
g_cam_ctrl.cam_obj[camera_idx] = cam_obj;
pthread_mutex_unlock(&g_intf_lock);
*camera_vtbl = &cam_obj->vtbl;
return 0;
}
}
这里调用 malloc 给方法变量分配内存,memset 初始化,然后接着调用 mm_camera_open 继续处理,mm_camera_open 方法的实现在 device\google\marlin\camera\QCamera2\stack\mm-camera-interface\src\mm_camera_interface.c 文件中,源码如下:
int32_t mm_camera_open(mm_camera_obj_t *my_obj)
{
char dev_name[MM_CAMERA_DEV_NAME_LEN];
int32_t rc = 0;
int8_t n_try=MM_CAMERA_DEV_OPEN_TRIES;
uint8_t sleep_msec=MM_CAMERA_DEV_OPEN_RETRY_SLEEP;
int cam_idx = 0;
const char *dev_name_value = NULL;
int l_errno = 0;
LOGD("begin\n");
if (NULL == my_obj) {
goto on_error;
}
dev_name_value = mm_camera_util_get_dev_name(my_obj->my_hdl);
if (NULL == dev_name_value) {
goto on_error;
}
snprintf(dev_name, sizeof(dev_name), "/dev/%s",
dev_name_value);
sscanf(dev_name, "/dev/video%d", &cam_idx);
LOGD("dev name = %s, cam_idx = %d", dev_name, cam_idx);
do{
n_try--;
errno = 0;
my_obj->ctrl_fd = open(dev_name, O_RDWR | O_NONBLOCK);
l_errno = errno;
LOGD("ctrl_fd = %d, errno == %d", my_obj->ctrl_fd, l_errno);
if((my_obj->ctrl_fd >= 0) || (errno != EIO && errno != ETIMEDOUT) || (n_try <= 0 )) {
break;
}
LOGE("Failed with %s error, retrying after %d milli-seconds",
strerror(errno), sleep_msec);
usleep(sleep_msec * 1000U);
}while (n_try > 0);
if (my_obj->ctrl_fd < 0) {
LOGE("cannot open control fd of ''%s'' (%s)\n",
dev_name, strerror(l_errno));
if (l_errno == EBUSY)
rc = -EUSERS;
else
rc = -1;
goto on_error;
} else {
mm_camera_get_session_id(my_obj, &my_obj->sessionid);
LOGH("Camera Opened id = %d sessionid = %d", cam_idx, my_obj->sessionid);
}
#ifdef DAEMON_PRESENT
/* open domain socket*/
n_try = MM_CAMERA_DEV_OPEN_TRIES;
do {
n_try--;
my_obj->ds_fd = mm_camera_socket_create(cam_idx, MM_CAMERA_SOCK_TYPE_UDP);
l_errno = errno;
LOGD("ds_fd = %d, errno = %d", my_obj->ds_fd, l_errno);
if((my_obj->ds_fd >= 0) || (n_try <= 0 )) {
LOGD("opened, break out while loop");
break;
}
LOGD("failed with I/O error retrying after %d milli-seconds",
sleep_msec);
usleep(sleep_msec * 1000U);
} while (n_try > 0);
if (my_obj->ds_fd < 0) {
LOGE("cannot open domain socket fd of ''%s''(%s)\n",
dev_name, strerror(l_errno));
rc = -1;
goto on_error;
}
#else /* DAEMON_PRESENT */
cam_status_t cam_status;
cam_status = mm_camera_module_open_session(my_obj->sessionid,
mm_camera_module_event_handler);
if (cam_status < 0) {
LOGE("Failed to open session");
if (cam_status == CAM_STATUS_BUSY) {
rc = -EUSERS;
} else {
rc = -1;
}
goto on_error;
}
#endif /* DAEMON_PRESENT */
pthread_mutex_init(&my_obj->msg_lock, NULL);
pthread_mutex_init(&my_obj->cb_lock, NULL);
pthread_mutex_init(&my_obj->evt_lock, NULL);
PTHREAD_COND_INIT(&my_obj->evt_cond);
LOGD("Launch evt Thread in Cam Open");
snprintf(my_obj->evt_thread.threadName, THREAD_NAME_SIZE, "CAM_Dispatch");
mm_camera_cmd_thread_launch(&my_obj->evt_thread,
mm_camera_dispatch_app_event,
(void *)my_obj);
/* launch event poll thread
* we will add evt fd into event poll thread upon user first register for evt */
LOGD("Launch evt Poll Thread in Cam Open");
snprintf(my_obj->evt_poll_thread.threadName, THREAD_NAME_SIZE, "CAM_evntPoll");
mm_camera_poll_thread_launch(&my_obj->evt_poll_thread,
MM_CAMERA_POLL_TYPE_EVT);
mm_camera_evt_sub(my_obj, TRUE);
/* unlock cam_lock, we need release global intf_lock in camera_open(),
* in order not block operation of other Camera in dual camera use case.*/
pthread_mutex_unlock(&my_obj->cam_lock);
LOGD("end (rc = %d)\n", rc);
return rc;
on_error:
if (NULL == dev_name_value) {
LOGE("Invalid device name\n");
rc = -1;
}
if (NULL == my_obj) {
LOGE("Invalid camera object\n");
rc = -1;
} else {
if (my_obj->ctrl_fd >= 0) {
close(my_obj->ctrl_fd);
my_obj->ctrl_fd = -1;
}
#ifdef DAEMON_PRESENT
if (my_obj->ds_fd >= 0) {
mm_camera_socket_close(my_obj->ds_fd);
my_obj->ds_fd = -1;
}
#endif
}
/* unlock cam_lock, we need release global intf_lock in camera_open(),
* in order not block operation of other Camera in dual camera use case.*/
pthread_mutex_unlock(&my_obj->cam_lock);
return rc;
}
到这里,终于看到了 open 的系统调用,HAL 端也就是从这里进入内核,调用驱动来处理的,这里大家可以看到,是通过 do/while 循环来处理的,有一个重试机制,重试次数 n_try 不断的减小,当它等于 0 时,相机设备还未正常打开,就退出 do/while 循环了,它的初值为 MM_CAMERA_DEV_OPEN_TRIES,该宏定义的值为 20,在 do 判断中,只要 if ((my_obj->ctrl_fd >= 0) || (errno != EIO && errno != ETIMEDOUT) || (n_try <= 0 )) 条件中有一个成立,就跳出循环,(my_obj->ctrl_fd >= 0) 的意思是就 camera 打开成功,返回的 FD 有效;(errno != EIO && errno != ETIMEDOUT) 的意思是未出现 IO 或者超时错误;(n_try <= 0 ) 意思是重试次数已用完,打开成功后,还要进行一些其他初始化的操作。
到这里,openCamera 才算完成了,大家可以看到,中间的过程真是复杂,当然我们所分析的部分还没有包含驱动部分,想要搞清楚整个逻辑,还是要花费很大的气力的,也希望我们搞技术的同事,能够认认真真的静下心来专心搞技术,以此来提升我们的能力。
好了,今天就到这里,休息一下!

Android : Camera 之 camx hal 架构
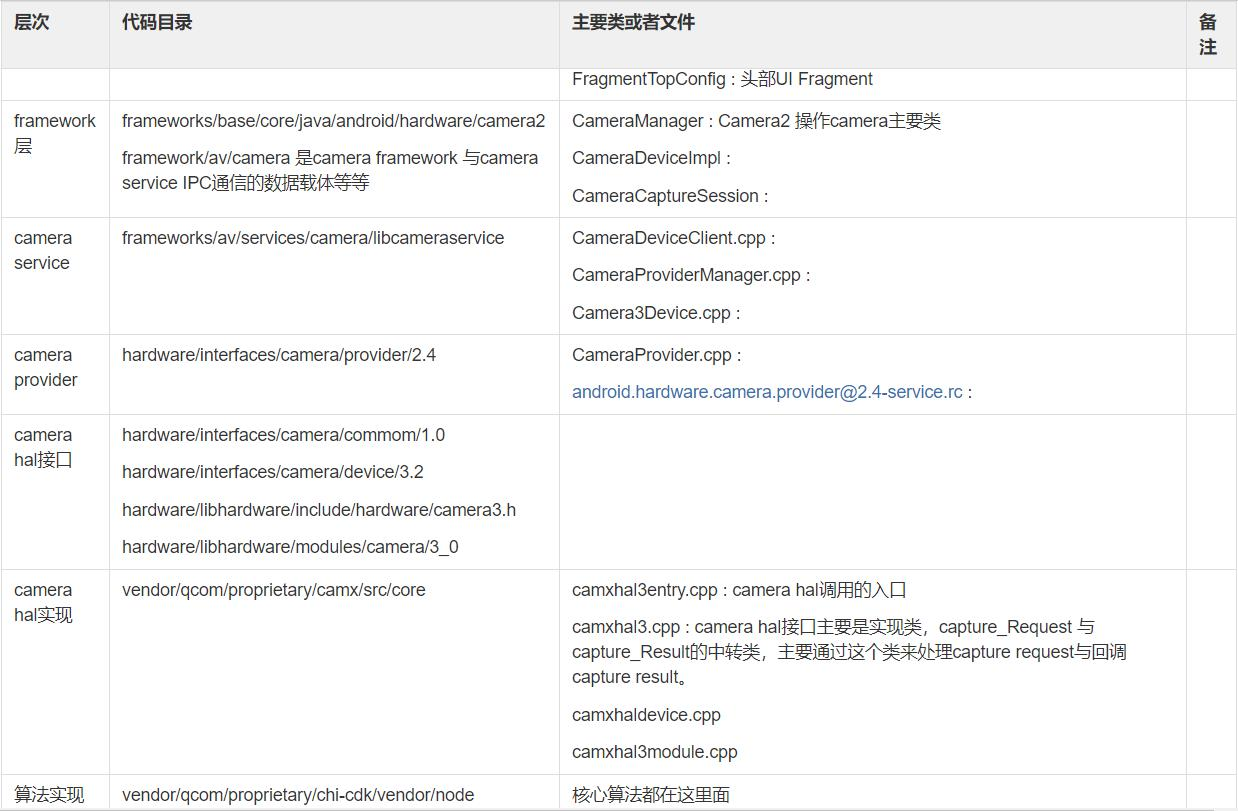
一、camx 的代码结构
目前主流的机型都使用 camx 架构,这个架构和之前架构的主要区别就是 芯片接口层的代码从 hardware/qcom 迁移到 vendor/qcom/proprietary/ 下面,
我们主要关注的 camera hal 层的源码也是放在 vendor/qcom/proprietary/camx/ 下面。
二、camx 编译:
camx 的核心目录是 vendor/qcom/proprietary/camx/src/ 目录下面:
total 40
drwxrwxr-x 10 lxl lxl 4096 4月 4 10:52 ./
drwxrwxr-x 4 lxl lxl 4096 4月 4 10:52 ../
drwxrwxr-x 3 lxl lxl 4096 4月 4 10:52 chiiqutils/
drwxrwxr-x 7 lxl lxl 4096 4月 4 10:56 core/
drwxrwxr-x 7 lxl lxl 4096 4月 4 10:52 csl/
drwxrwxr-x 14 lxl lxl 4096 4月 4 10:52 hwl/
drwxrwxr-x 3 lxl lx 4096 4月 4 10:52 lib/
drwxrwxr-x 3 lxl lxl 4096 4月 4 10:52 osutils/
drwxrwxr-x 11 lxl lxl 4096 4月 4 10:52 swl/
drwxrwxr-x 3 lxl lxl 4096 4月 4 10:52 utils/ 核心的 Android.mk 在 ./lib/build/android/Android.mk 中。
其中包括的静态库如下:
# Libraries to link
LOCAL_STATIC_LIBRARIES := \
libcamxcore \
libcamxchi \
libcamxcsl \
libcamxofflinestats \
libnc \
libcamxncs \
libifestriping \
libstriping
LOCAL_WHOLE_STATIC_LIBRARIES := \
libcamxdspstreamer \
libcamxhwlbps \
libcamxgenerated \
libcamxhal \
libcamxhalutils \
libcamxhwlfd \
libcamxhwlife \
libcamxhwlipe \
libcamxhwliqmodule \
libcamxswlfdmanager \
libcamxswljpeg \
libcamxhwljpeg \
libcamxhwllrme \
libcamxswlransac \
libcamxhwltitan17x \
libcamxiqsetting \
libcamxosutils \
libcamxstats \
libcamxsensor \
libcamxutils
这些静态库都是 camx 或者其他的目录下编译的,编译工程的时候,我们要先编译这些静态库,然后编译 camx 的动态库(/vendor/lib/hw/camera.qcom.so)。
三、camx 代码流程分析:
camera.provider 中如何实现到 camera hal 层的跳跃,camera service 调用到 camera provider 中的接口方法,现在调用到 camera provider 中的 hardware/interfaces/camera/device/3.2/default/CameraDeviceSession.cpp 中的 processCaptureRequest (...) 方法,最终会调用到:
status_t ret = mDevice->ops->process_capture_request(mDevice, &halRequest);
这个 mDevice->ops 就是 hardware/libhardware/include/hardware/camera3.h 中的 camera3_device_ops 结构体: (参考:https://www.jianshu.com/p/099cc3b0ab25)
typedef struct camera3_device_ops {
int (*initialize)(const struct camera3_device *,
const camera3_callback_ops_t *callback_ops);
int (*configure_streams)(const struct camera3_device *,
camera3_stream_configuration_t *stream_list);
int (*register_stream_buffers)(const struct camera3_device *,
const camera3_stream_buffer_set_t *buffer_set);
const camera_metadata_t* (*construct_default_request_settings)(
const struct camera3_device *,
int type);
int (*process_capture_request)(const struct camera3_device *,
camera3_capture_request_t *request);
void (*get_metadata_vendor_tag_ops)(const struct camera3_device*,
vendor_tag_query_ops_t* ops);
void (*dump)(const struct camera3_device *, int fd);
int (*flush)(const struct camera3_device *);
/* reserved for future use */
void *reserved[8];
} camera3_device_ops_t;camera3_device_ops_t 映射函数指针操作: hardware/libhardware/modules/camera/3_0/Camera.cpp
const camera3_device_ops_t Camera::sOps = {
.initialize = default_camera_hal::initialize,
.configure_streams = default_camera_hal::configure_streams,
.register_stream_buffers = default_camera_hal::register_stream_buffers,
.construct_default_request_settings
= default_camera_hal::construct_default_request_settings,
.process_capture_request = default_camera_hal::process_capture_request,
.get_metadata_vendor_tag_ops = NULL,
.dump = default_camera_hal::dump,
.flush = default_camera_hal::flush,
.reserved = {0},
}; 这样找到在 camera hal 层的函数指针的映射关系。
映射到:vendor/qcom/proprietary/camx/src/core/hal/camxhal3entry.cpp 中的:
// Global dispatch
static Dispatch g_dispatchHAL3(&g_jumpTableHAL3);/// Array containing camera3_device_ops_t methods
static camera3_device_ops_t g_camera3DeviceOps =
{
CamX::initialize,
CamX::configure_streams,
NULL,
CamX::construct_default_request_settings,
CamX::process_capture_request,
NULL,
CamX::dump,
CamX::flush,
{0},
};/// Array containing camera3_device_ops_t methods
static camera3_device_ops_t g_camera3DeviceOps =
{
CamX::initialize,
CamX::configure_streams,
NULL,
CamX::construct_default_request_settings,
CamX::process_capture_request,
NULL,
CamX::dump,
CamX::flush,
{0},
};并在 \vendor\qcom\proprietary\camx\src\core\hal\camxhaldevice.cpp 的 Initialize 方法中通过 GetCamera3DeviceOps 获取,建立联系:
CamxResult HALDevice::Initialize(
const HwModule* pHwModule,
UINT32 cameraId)
{
CamxResult result = CamxResultSuccess;
m_cameraId = cameraId;
if (CamxResultSuccess == result)
{
m_camera3Device.hwDevice.tag = HARDWARE_DEVICE_TAG; /// @todo (CAMX-351) Get from local macro
m_camera3Device.hwDevice.version = CAMERA_DEVICE_API_VERSION_3_3;
m_camera3Device.hwDevice.close = reinterpret_cast<CloseFunc>(GetHwDeviceCloseFunc());
m_camera3Device.pDeviceOps = reinterpret_cast<Camera3DeviceOps*>(GetCamera3DeviceOps());
m_camera3Device.pPrivateData = this;
// NOWHINE CP036a: Need exception here
m_camera3Device.hwDevice.pModule = const_cast<HwModule*>(pHwModule);
m_HALCallbacks.ProcessCaptureResult = ProcessCaptureResult;
m_HALCallbacks.NotifyResult = Notify;
CamX::ChiOverrideBypass(&m_HALCallbacks);
}
m_pHALSession = NULL;
Utils::Memset(m_flushRequest, 0, sizeof(m_flushRequest));
return result;
}看一下 g_jumpTableHAL3 变量:在 vendor/qcom/proprietary/camx/src/core/hal/camxhal3.cpp 中定义的:
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
// Jump table for HAL3
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
JumpTableHAL3 g_jumpTableHAL3 =
{
open,
get_number_of_cameras,
get_camera_info,
set_callbacks,
get_vendor_tag_ops,
open_legacy,
set_torch_mode,
init,
parallelQuery,
setCallBack,
get_tag_count,
get_all_tags,
get_section_name,
get_tag_name,
get_tag_type,
close,
initialize,
configure_streams,
construct_default_request_settings,
process_capture_request,
dump,
flush,
camera_device_status_change,
torch_mode_status_change,
process_capture_result,
notify
};这儿直接构成了指针函数的映射关系(对应 camxhaldevice.cpp 中的函数)。
vendor/qcom/proprietary/camx/src/core/chi/camxchitypes.h 中定义了 CHIAppCallbacks 结构体,如下:
struct CHIAppCallbacks
{
/// @brief Called by the driver to get number of cameras
INT(*CHIGetNumCameras)(
UINT32* pNumFwCameras,
UINT32* pNumLogicalCameras);
/// @brief Called by the driver to get the camera info for the camera id
CamxResult (*CHIGetCameraInfo)(
UINT32 cameraId,
CameraInfo* pCameraInfo);
/// @brief Defines the prototype for the device status change callback method from to the framework. Please refer to
/// the camera_device_status_change documentation in hardware/camera_common.h.
VOID (*CHIInitializeOverrideSession)(
UINT32 cameraId,
const Camera3Device* pCamera3Device,
const HALCallbacks* pHALCallbacks,
Camera3StreamConfig* pStreamConfig,
BOOL* isOverrideEnabled,
VOID** ppPrivate);
/// @brief Defines the prototype for the torch mode status change callback method from to the framework. Please refer to
/// the torch_mode_status_change documentation in hardware/camera_common.h.
VOID (*CHIFinalizeOverrideSession)(
const Camera3Device* pCamera3Device,
UINT64* pSession,
VOID** ppPrivate);
/// @brief Called by the driver to inform about session closing
VOID (*CHITeardownOverrideSession)(
const Camera3Device* pCamera3Device,
UINT64* pSession,
VOID* pPrivate);
/// @brief Called by the driver to pass on capture request call to CHI
INT (*CHIOverrideProcessRequest)(
const Camera3Device* pCamera3Device,
Camera3CaptureRequest* pCaptureRequest,
VOID* pPrivate);
/// @brief Called by the driver to allow for additional override processing during open()
INT(*CHIExtendOpen)(
UINT32 cameraId,
VOID* pPrivateData);
/// @brief Called by the driver to allow for additional override processing during close()
INT(*CHIExtendClose)(
UINT32 cameraId,
VOID* pPrivateData);
/// @brief Called by the driver to allow override to remap special camera IDs into logical camera IDs
UINT32(*CHIRemapCameraId)(
UINT32 frameworkCameraId,
CameraIdRemapMode mode);
/// @brief Interface to allow various override-specific settings to be toggled.
UINT32(*CHIModifySettings)(
VOID* pPrivateData);
/// @brief Get any vendor tag specific request settings the override wants to get added to the default settings
VOID (*CHIGetDefaultRequestSettings)(
UINT32 frameworkCameraId,
INT requestTemplate,
const Metadata** pAdditionalMetadata);
/// @brief Called by the driver to allow for flush()
INT(*CHIOverrideFlush)(
const Camera3Device* pCamera3Device);
INT(*CHIParallelQuery) (INT num, char* list[]);
INT(*CHISetCallback) (void*);
};
typedef VOID(*CHIHALOverrideEntry)(
CHIAppCallbacks* pCHIAppCallbacks); 这个结构体是函数指针,映射关系:
vendor/qcom/proprietary/camx/src/core/hal/camxhal3module.h 中定义了 CHIAppCallbacks m_ChiAppCallbacks;
CHIAppCallbacks m_ChiAppCallbacks; ///< CHI HAL override entryvendor/qcom/proprietary/camx/src/core/hal/camxhal3module.cpp 中的 HAL3Module 构造函数中,存在下面的执行语句:
CHIHALOverrideEntry funcCHIHALOverrideEntry =
reinterpret_cast<CHIHALOverrideEntry>(
CamX::OsUtils::LibGetAddr(m_hChiOverrideModuleHandle, "chi_hal_override_entry"));
if (NULL != funcCHIHALOverrideEntry)
{
funcCHIHALOverrideEntry(&m_ChiAppCallbacks); //对应到 chxextensioninterface.cpp 中的chi_hal_override_entry函数
CAMX_ASSERT(NULL != m_ChiAppCallbacks.CHIGetNumCameras);
CAMX_ASSERT(NULL != m_ChiAppCallbacks.CHIGetCameraInfo);
CAMX_ASSERT(NULL != m_ChiAppCallbacks.CHIFinalizeOverrideSession);
CAMX_ASSERT(NULL != m_ChiAppCallbacks.CHIInitializeOverrideSession);
CAMX_ASSERT(NULL != m_ChiAppCallbacks.CHIOverrideProcessRequest);
CAMX_ASSERT(NULL != m_ChiAppCallbacks.CHIOverrideFlush);
CAMX_ASSERT(NULL != m_ChiAppCallbacks.CHITeardownOverrideSession);
CAMX_ASSERT(NULL != m_ChiAppCallbacks.CHIExtendOpen);
CAMX_ASSERT(NULL != m_ChiAppCallbacks.CHIExtendClose);
CAMX_ASSERT(NULL != m_ChiAppCallbacks.CHIRemapCameraId);
CAMX_ASSERT(NULL != m_ChiAppCallbacks.CHIModifySettings);
CAMX_ASSERT(NULL != m_ChiAppCallbacks.CHIParallelQuery);
CAMX_ASSERT(NULL != m_ChiAppCallbacks.CHISetCallback);
if ((NULL != m_ChiAppCallbacks.CHIGetNumCameras) &&
(NULL != m_ChiAppCallbacks.CHIGetCameraInfo) &&
(NULL != m_ChiAppCallbacks.CHIFinalizeOverrideSession) &&
(NULL != m_ChiAppCallbacks.CHIInitializeOverrideSession) &&
(NULL != m_ChiAppCallbacks.CHIOverrideProcessRequest) &&
(NULL != m_ChiAppCallbacks.CHIOverrideFlush) &&
(NULL != m_ChiAppCallbacks.CHITeardownOverrideSession) &&
(NULL != m_ChiAppCallbacks.CHIExtendOpen) &&
(NULL != m_ChiAppCallbacks.CHIExtendClose) &&
(NULL != m_ChiAppCallbacks.CHIRemapCameraId) &&
(NULL != m_ChiAppCallbacks.CHIModifySettings) &&
(NULL != m_ChiAppCallbacks.CHIParallelQuery) &&
(NULL != m_ChiAppCallbacks.CHISetCallback))
{
CAMX_LOG_WARN(CamxLogGroupHAL, "CHI Module library function pointers exchanged");
}
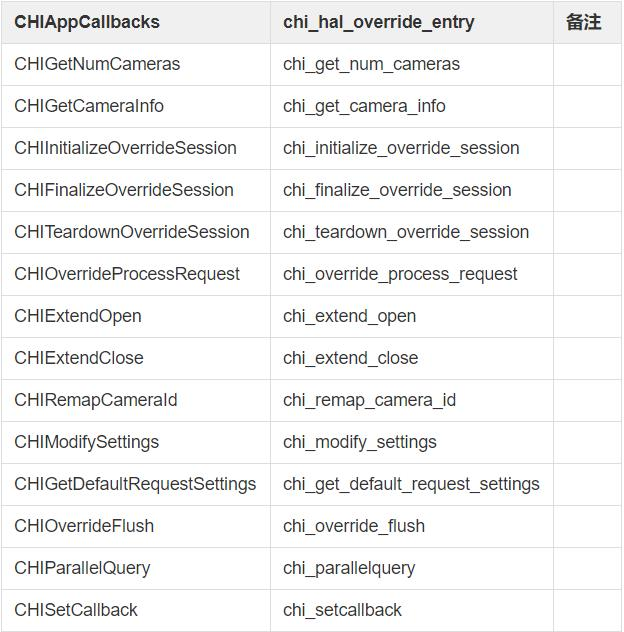
}m_ChiAppCallbacks 通过 funcCHIHALOverrideEntry 映射到 chi_hal_override_entry 这个 chi_hal_override_entry 就是指 vendor/qcom/proprietary/chi-cdk/vendor/chioverride/default/chxextensioninterface.cpp 中的 chi_hal_override_entry 函数,如下:
void chi_hal_override_entry(
chi_hal_callback_ops_t* callbacks)
{
ExtensionModule* pExtensionModule = ExtensionModule::GetInstance();
CHX_ASSERT(NULL != callbacks);
if (NULL != pExtensionModule)
{
callbacks->chi_get_num_cameras = chi_get_num_cameras;
callbacks->chi_get_camera_info = chi_get_camera_info;
callbacks->chi_initialize_override_session = chi_initialize_override_session;
callbacks->chi_finalize_override_session = chi_finalize_override_session;
callbacks->chi_override_process_request = chi_override_process_request;
callbacks->chi_teardown_override_session = chi_teardown_override_session;
callbacks->chi_extend_open = chi_extend_open;
callbacks->chi_extend_close = chi_extend_close;
callbacks->chi_remap_camera_id = chi_remap_camera_id;
callbacks->chi_modify_settings = chi_modify_settings;
callbacks->chi_get_default_request_settings = chi_get_default_request_settings;
callbacks->chi_override_flush = chi_override_flush;
callbacks->chi_parallelquery = chi_parallelquery;
callbacks->chi_setcallback = chi_setcallback;
}
}这样就建立了 CHIAppCallbacks 中函数指针的一一映射关系。
vendor/qcom/proprietary/chi-cdk/vendor/chioverride/default/chxextensionmodule.cpp 中的 ExtensionModule::OverrideProcessRequest 函数中执行了 m_pUsecaseFactory->CreateUsecaseObject,如下:
m_pSelectedUsecase[logicalCameraId] =
m_pUsecaseFactory->CreateUsecaseObject(&m_logicalCameraInfo[logicalCameraId],
static_cast<UsecaseId>(m_SelectedUsecaseId[logicalCameraId]),
m_pStreamConfig[logicalCameraId]);直接调用到: vendor/qcom/proprietary/chi-cdk/vendor/chioverride/default/chxusecaseutils.cpp 中的 UsecaseFactory::CreateUsecaseObject 函数:
Usecase* UsecaseFactory::CreateUsecaseObject(
LogicalCameraInfo* pLogicalCameraInfo, ///< camera info
UsecaseId usecaseId, ///< Usecase Id
camera3_stream_configuration_t* pStreamConfig) ///< Stream config
{
Usecase* pUsecase = NULL;
UINT camera0Id = pLogicalCameraInfo->ppDeviceInfo[0]->cameraId;
CHX_LOG_ERROR("UsecaseFactory::CreateUsecaseObject id = %d", usecaseId);
switch (usecaseId)
{
case UsecaseId::PreviewZSL:
pUsecase = AdvancedCameraUsecase::Create(pLogicalCameraInfo, pStreamConfig, usecaseId);
break;
case UsecaseId::MultiCamera:
pUsecase = UsecaseMultiCamera::Create(pLogicalCameraInfo, pStreamConfig);
break;
case UsecaseId::MultiCameraVR:
pUsecase = UsecaseMultiVRCamera::Create(pLogicalCameraInfo, pStreamConfig);
break;
case UsecaseId::MFNR:
pUsecase = UsecaseMFNR::Create(camera0Id, pStreamConfig);
break;
case UsecaseId::QuadCFA:
pUsecase = UsecaseQuadCFA::Create(pLogicalCameraInfo, pStreamConfig);
break;
case UsecaseId::Torch:
pUsecase = UsecaseTorch::Create(camera0Id, pStreamConfig);
break;
default:
pUsecase = AdvancedCameraUsecase::Create(pLogicalCameraInfo, pStreamConfig, usecaseId);
break;
}
return pUsecase;
}enum class UsecaseId
{
NoMatch = 0,
Default = 1,
Preview = 2,
PreviewZSL = 3,
MFNR = 4,
MFSR = 5,
MultiCamera = 6,
QuadCFA = 7,
RawJPEG = 8,
MultiCameraVR = 9,
Torch = 10,
YUVInBlobOut = 11,
MaxUsecases = 12,
};前置摄像头的 UsecaseId 是 PreviewZSL,是单摄,后置摄像头的 UsecaseId 是 MultiCamera,是多摄。

camx-usecase

vendor/qcom/proprietary/camx/src/core/chi/camxchi.cpp 中的 ChiEntry 函数如下:
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
/// ChiEntry
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
CAMX_VISIBILITY_PUBLIC VOID ChiEntry(
ChiContextOps* pChiContextOps)
{
if (NULL != pChiContextOps)
{
pChiContextOps->size = sizeof(ChiContextOps);
pChiContextOps->majorVersion = CHI_API_MAJOR_VERSION;
pChiContextOps->minorVersion = CHI_API_MINOR_VERSION;
pChiContextOps->pOpenContext = CamX::ChiOpenContext;
pChiContextOps->pCloseContext = CamX::ChiCloseContext;
pChiContextOps->pGetNumCameras = CamX::ChiGetNumCameras;
pChiContextOps->pGetCameraInfo = CamX::ChiGetCameraInfo;
pChiContextOps->pEnumerateSensorModes = CamX::ChiEnumerateSensorModes;
pChiContextOps->pCreatePipelineDescriptor = CamX::ChiCreatePipelineDescriptor;
pChiContextOps->pDestroyPipelineDescriptor = CamX::ChiDestroyPipelineDescriptor;
pChiContextOps->pCreateSession = CamX::ChiCreateSession;
pChiContextOps->pDestroySession = CamX::ChiDestroySession;
pChiContextOps->pFlushSession = CamX::ChiFlushSession;
pChiContextOps->pActivatePipeline = CamX::ChiActivatePipeline;
pChiContextOps->pDeactivatePipeline = CamX::ChiDeactivatePipeline;
pChiContextOps->pSubmitPipelineRequest = CamX::ChiSubmitPipelineRequest;
pChiContextOps->pTagOps = CamX::ChiGetTagOps;
}
// This is the workaround for presil HAL3test on Windows
// On Device, set_camera_metadata_vendor_ops will be call the set the
// static vendor tag operation in camera_metadata.c
//
// On Windows side, theoretically hal3test should mimic what Android framework
// does and call the set_camera_metadata_vendor_ops function in libcamxext library
// However, in Windows, if both hal3test.exe and hal.dll link to libcamxext library,
// there are two different instance of static varibles sit in different memory location.
// Even if set_camera_metadata_vendor_ops is called in hal3test, when hal try to
// access to vendor tag ops, it is still not set.
//
// This is also a workaround to call vendor tag ops in Chi at GetNumCameras which happens to get called before
// GetVendorTagOps
CamX::g_vendorTagOps.get_all_tags = CamX::ChiGetAllTags;
CamX::g_vendorTagOps.get_section_name = CamX::ChiGetSectionName;
CamX::g_vendorTagOps.get_tag_count = CamX::ChiGetTagCount;
CamX::g_vendorTagOps.get_tag_name = CamX::ChiGetTagName;
CamX::g_vendorTagOps.get_tag_type = CamX::ChiGetTagType;
set_camera_metadata_vendor_ops(&(CamX::g_vendorTagOps));
}这个函数映射关系很重要,也在 camx chi 中比较常见,直接映射在此文件的 CamxChi 类中。都是从 vendor/qcom/proprietary/chi-cdk/vendor/chioverride/default/chxextensionmodule.cpp 中调用过来的。
下面是预览时 capture request 处理流程图:

check 这段流程的时候我们最关注应该是 5 个重要的处理类型:
1.UseCase , vendor/qcom/proprietary/chi-cdk/vendor/chioverride/default/chxusecase.h 上面有介绍类图。UseCase 在 camx 中很有很多衍生类,这是 camx 针对不同的 stream 来建立不同的 usecase 对象,用来管理选择 feature,并且创建 pipeline 以及 session。
2.ChiFeature, vendor/qcom/proprietary/chi-cdk/vendor/chioverride/default/chxfeature.h, usecase 选择相应的 feature,关联一组 pipeline,收到 request 请求,根据 request 选择对应的 feature。
3.Node , vendro/qcom/propriatary/camx/src/core/camxnode.h ,下面有类图。Node 是 camx 中非常重要的一个父类,是 camx 中处理 camera 请求的一个中间节点,用于处理 pipeline 下发的请求,下面有类图介绍,比较重要 ** 的 Node 子类已经标出来了。
4.pipeline , 一连串 node 的集合,通过 pipeline 下发给各个 node 处理。
5.session , 若干个有关联的 pipeline 的集合,用来管理 pipeline,使用 pipeline 处理请求。
注: Node 节点在 camx chi 架构中至关重要,数据的处理都是通过封装好的 Node 节点来进行的。
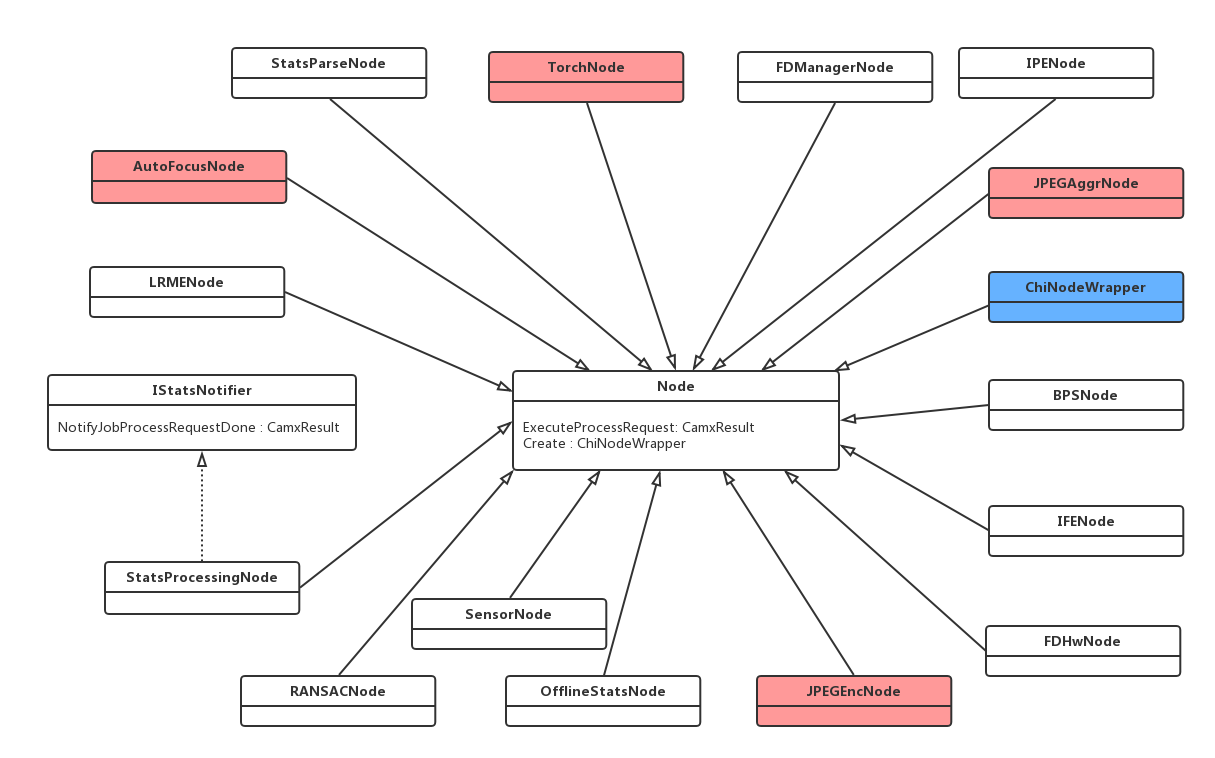
camxnode 结构图:
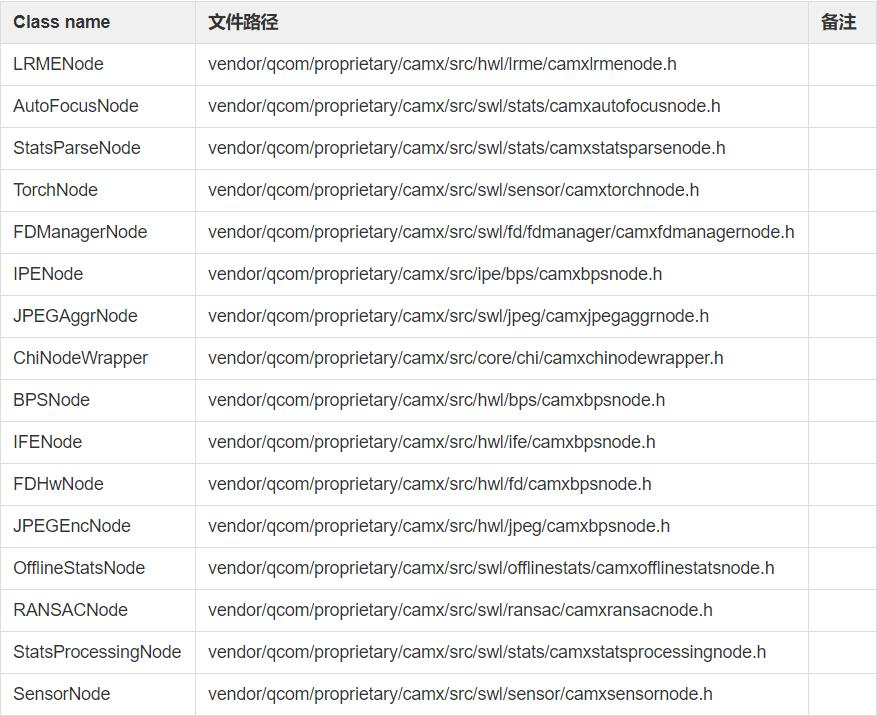
node 节点的创建地方在 vendor/qcom/proprietary/camx/src/hwl/titian17x/camxtitian17xfactory.cpp
Node* Titan17xFactory::HwCreateNode(
const NodeCreateInputData* pCreateInputData,
NodeCreateOutputData* pCreateOutputData
) const
{
Node* pNode = NULL;
switch (pCreateInputData->pNodeInfo->nodeId)
{
case AutoFocus:
pNode = AutoFocusNode::Create(pCreateInputData, pCreateOutputData);
break;
case BPS:
pNode = BPSNode::Create(pCreateInputData, pCreateOutputData);
break;
case IFE:
pNode = IFENode::Create(pCreateInputData, pCreateOutputData);
break;
case IPE:
pNode = IPENode::Create(pCreateInputData, pCreateOutputData);
break;
case Sensor:
pNode = SensorNode::Create(pCreateInputData, pCreateOutputData);
break;
case StatsProcessing:
pNode = StatsProcessingNode::Create(pCreateInputData, pCreateOutputData);
break;
case JPEG:
pNode = JPEGEncNode::Create(pCreateInputData, pCreateOutputData);
break;
case JPEGAggregator:
pNode = JPEGAggrNode::Create(pCreateInputData, pCreateOutputData);
break;
case StatsParse:
pNode = StatsParseNode::Create(pCreateInputData, pCreateOutputData);
break;
case ChiExternalNode:
pNode = ChiNodeWrapper::Create(pCreateInputData, pCreateOutputData);
break;
case FDHw:
pNode = FDHwNode::Create(pCreateInputData, pCreateOutputData);
break;
case FDManager:
pNode = FDManagerNode::Create(pCreateInputData, pCreateOutputData);
break;
case OfflineStats:
pNode = OfflineStatsNode::Create(pCreateInputData, pCreateOutputData);
break;
case Torch:
pNode = TorchNode::Create(pCreateInputData, pCreateOutputData);
break;
case LRME:
pNode = LRMENode::Create(pCreateInputData, pCreateOutputData);
break;
case RANSAC:
pNode = RANSACNode::Create(pCreateInputData, pCreateOutputData);
break;
default:
CAMX_ASSERT_ALWAYS_MESSAGE("Unexpected node type");
break;
}
return pNode;
} 
camx_feature:
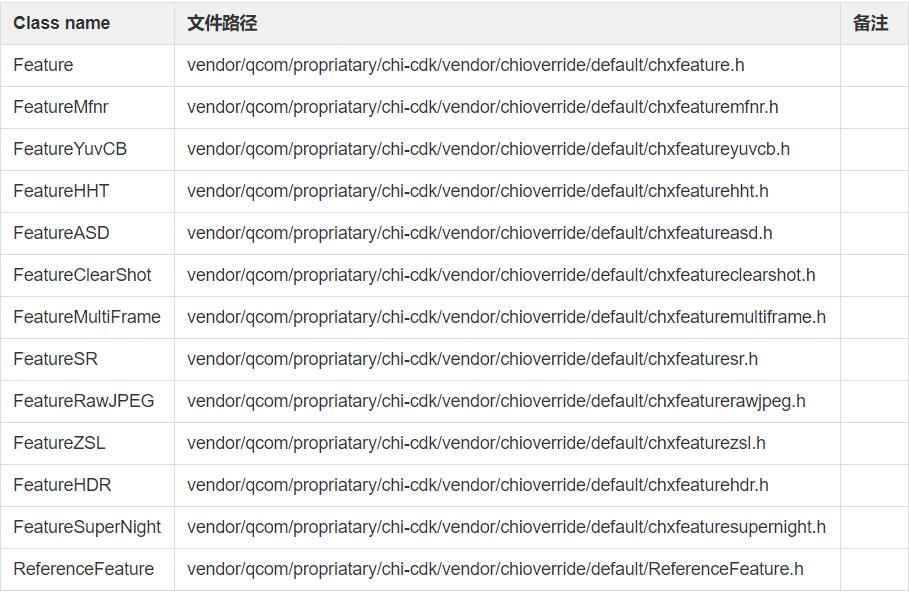
在 vendor/qcom/proprietary/chi-cdk/vendor/chioverride/default/chxadvancedcamerausecase.cpp 中的 SelectFeatures (...) 函数中有这些 feature 的创建代码。
拍照的场景分为前置和后置,前置是单摄,后置是多摄,前面也有介绍,单摄和多摄使用的 usecase 是不同:
前置拍照创建的 pipeline 有:
MiuiZSLSnapshotJpeg at index 0 for session 0, session''s pipeline 0, camera id:1
MiuiZSLPreviewRaw at index 1 for session 1, session''s pipeline 0, camera id:1
BinningZSLYuv2Jpeg at index 2 for session 2, session''s pipeline 0, camera id:1
BinningMerge3YuvCustomTo1Yuv at index 3 for session 3, session''s pipeline 0, camera id:1
ZSLSnapshotYUV at index 4 for session 4, session''s pipeline 0, camera id:1
AdvancedAsdMeta at index 5 for session 5, session''s pipeline 0, camera id:1
SWMFClearShotYuv at index 6 for session 6, session''s pipeline 0, camera id:1
BinningZSLSnapshotYUV at index 7 for session 7, session''s pipeline 0, camera id:1后置拍照创建的 pipeline 有:
BackCameraJpegEncode at index 0 for session 0, session''s pipeline 0, camera id:0
MfnrPrefilter at index 1 for session 0, session''s pipeline 1, camera id:0
MfnrBlend at index 2 for session 0, session''s pipeline 2, camera id:0
MfnrPostFilter at index 3 for session 0, session''s pipeline 3, camera id:0
MfnrScale at index 4 for session 0, session''s pipeline 4, camera id:0
Merge3YuvCustomTo1Yuv at index 5 for session 1, session''s pipeline 0, camera id:0
ZSLSnapshotYUV at index 6 for session 2, session''s pipeline 0, camera id:0
ZSLSnapshotYUVAux at index 7 for session 3, session''s pipeline 0, camera id:3
SWMFSRYuv at index 8 for session 4, session''s pipeline 0, camera id:0
AdvancedAsdMeta at index 9 for session 5, session''s pipeline 0, camera id:0 pipeline 在 camx 中的配置文件是:vendor/qcom/proprietary/chi-cdk/vendor/topology/default/titan17x_usecases.xml,编译时会根据此 xml 的配置生成对应 vendor\qcom\proprietary\chi-cdk\vendor\chioverride\default\g_pipelines.h,
vendor\qcom\proprietary\chi-cdk\vendor\chioverride\default\build\android\Android.mk:
...
$(info $(shell perl $(CAMX_CDK_PATH)/topology/usecaseconverter.pl $(CAMX_VENDOR_PATH)/topology/default/titan17x_usecases.xml $(LOCAL_PATH)/g_pipelines.h))
...然后在 \vendor\qcom\proprietary\chi-cdk\vendor\chioverride\default\chxusecaseutils.cpp 中会根据 pStreamConfig->num_streams 选择到对应的 Usecases(g_pipelines.h 中定义):
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
// UsecaseSelector::DefaultMatchingUsecase
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
ChiUsecase* UsecaseSelector::DefaultMatchingUsecase(
camera3_stream_configuration_t* pStreamConfig)
{
...
pSelectedUsecase = &pChiTargetUsecases->pChiUsecases[i];
...
}DefaultMatchingUsecase 方法即在 \vendor\qcom\proprietary\chi-cdk\vendor\chioverride\default\chxadvancedcamerausecase.cpp 被调用:
CDKResult AdvancedCameraUsecase::SelectUsecaseConfig(
LogicalCameraInfo* pCameraInfo, ///< Camera info
camera3_stream_configuration_t* pStreamConfig) ///< Stream configuration
{
...
m_pChiUsecase = UsecaseSelector::DefaultMatchingUsecase(pStreamConfig);
...
}
四、调试:
修改 \vendor\qcom\proprietary\camx\src\core\camxsettings.xml 设置 log 打印级别,如:
overrideLogLevels=0x1F
logInfoMask=0x40080
logVerboseMask=0x40000
-end-

Android Automotive types.hal 更改未自动生成
如何解决Android Automotive types.hal 更改未自动生成
我需要一些关于 types.hal 和 VehiclePropertyIds.java 的信息。 我在 types.hal 中添加了新属性,如下所示,
types.hal 文件更改,
enum ButtonStatus : int32_t {
ON = 1,OFF = 2
};
/**
* SunRoofButton
* @change_mode VehiclePropertyChangeMode:ON_CHANGE
* @access VehiclePropertyAccess:READ_WRITE
* @data_enum ButtonStatus
*/
SunRoof =(
0x0602
| VehiclePropertyGroup:vendOR
| VehiclePropertyType:INT32
| VehicleArea:SEAT),What should i do next to get these ids generated in **VehiclePropertyId.java**
Currently am doing following 3 steps
**Commands :**
. build/envsetup.sh
lunch aosp_car_x86-userdebug
make -j8
By this the build is successful but i don''t see these entries generated in vehiclePropertyIds.java
解决方法
您不应该直接编辑 HAL。
Vehicle HAL 可以通过其他方式扩展:您只需在要使用它的地方将您的 SunRoof 属性定义为一个整数(您可以参考 VehiclePropertyGroup 和其他枚举或只是硬编码 0x25400602 以进行快速和肮脏的测试)。这可能是您的 HAL 实现和面向用户的应用。
但是,请仔细检查是否:
- 您想将您的天窗按钮与座位区域相关联(每个座位都有自己的天窗按钮吗?)或只是全局区域
- 您不想重复使用 WINDOW_VENT_POS 或 WINDOW_VENT_MOVE
关于android hal 诠释和android haxm的问题就给大家分享到这里,感谢你花时间阅读本站内容,更多关于Android - 硬件抽象层(HAL)、Android 8.0 系统源码分析 --openCamera(HAL)启动过程源码分析、Android : Camera 之 camx hal 架构、Android Automotive types.hal 更改未自动生成等相关知识的信息别忘了在本站进行查找喔。
本文标签:




