在这篇文章中,我们将带领您了解CF1100CNNandtheOpticalIllusion的全貌,包括数学的相关情况。同时,我们还将为您介绍有关#640(Div.4)C.K-thNotDivisibl
在这篇文章中,我们将带领您了解CF 1100C NN and the Optical Illusion的全貌,包括数学的相关情况。同时,我们还将为您介绍有关#640(Div.4)C. K-th Not Divisible by n(数学)、(Review cs231n) Spatial Localization and Detection(classification and localization)、2018C Version CAT Caterpillar ET Diagnostic Adapter III PLUS DELLd630 laptop (Real Caterpillar ET...、AN3769: Using the Engine Position (CRANK and CAM) eTPU Functions – Application Note的知识,以帮助您更好地理解这个主题。
本文目录一览:- CF 1100C NN and the Optical Illusion(数学)
- #640(Div.4)C. K-th Not Divisible by n(数学)
- (Review cs231n) Spatial Localization and Detection(classification and localization)
- 2018C Version CAT Caterpillar ET Diagnostic Adapter III PLUS DELLd630 laptop (Real Caterpillar ET...
- AN3769: Using the Engine Position (CRANK and CAM) eTPU Functions – Application Note
")
CF 1100C NN and the Optical Illusion(数学)
NN is an experienced internet user and that means he spends a lot of time on the social media. Once he found the following image on the Net, which asked him to compare the sizes of inner circles:

It turned out that the circles are equal. NN was very surprised by this fact, so he decided to create a similar picture himself.
He managed to calculate the number of outer circles n and the radius of the inner circle r. NN thinks that, using this information, you can exactly determine the radius of the outer circles R so that the inner circle touches all of the outer ones externally and each pair of neighboring outer circles also touches each other. While NN tried very hard to guess the required radius, he didn''t manage to do that.
Help NN find the required radius for building the required picture.
Input
The first and the only line of the input file contains two numbers n
and r (3≤n≤100, 1≤r≤100) — the number of the outer circles and the radius of the inner circle respectively.
Output
Output a single number R— the radius of the outer circle required for building the required picture.
Your answer will be accepted if its relative or absolute error does not exceed 10−6.
Formally, if your answer is a and the jury''s answer is b. Your answer is accepted if and only when |a−b|max(1,|b|)≤10−6.
Sample Input
3 16.46410166 11.0000000100 1003.2429391
题目意思:用n个外圆将半径为r的內圆包围起来,使得彼此之间能够相切,问外圆的半径为多少?
解题思路:这是一道几乎题,我们需要引入辅助线
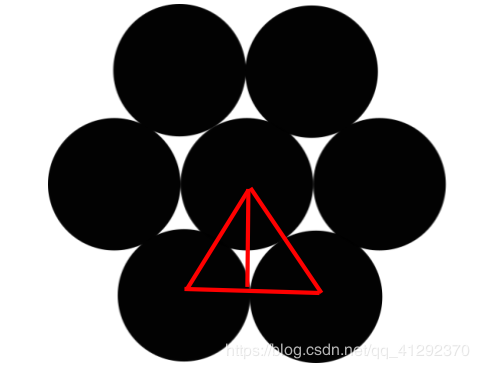
我们设外圆的半径为R 我们可以得到左边(左右其实都一样)那个等腰三角形三角形的斜边长度为R+r,底边为R。又因为的所有圆心连接起来就是一个正多边形,我们知道多边形
内角和为:π*(n-2)(这里外面小圆有多少个,n就为多少,这个可以在草稿本上画一下)。很明显,n个球可以分割成n个这样的等腰三角形。
然后一个底角的角度为π*(n-2)/n/2;现在我们可以根据余弦公式得到:R/(R+r)=cos(a);这样就可以推出R:R=R=r*cos(a)/(1-cos(a));
#include<cstdio>
#include<cstring>
#include<algorithm>
#include<cmath>
#define PI acos(-1.0)
using namespace std;
int main()
{
double n,r,x;
scanf("%lf%lf",&n,&r);
x=PI*(n-2)/n;
printf("%.7f\n",r*cos(x/2)/(1-cos(x/2)));
return 0;
}
C. K-th Not Divisible by n(数学)")
#640(Div.4)C. K-th Not Divisible by n(数学)
题目描述
You are given two positive integers n and k. Print the k-th positive integer that is not divisible by n.
For example, if n=3, and k=7, then all numbers that are not divisible by 3 are: 1,2,4,5,7,8,10,11,13…. The 7-th number among them is 10.
Input
The first line contains an integer t (1≤t≤1000) — the number of test cases in the input. Next, t test cases are given, one per line.
Each test case is two positive integers n (2≤n≤109) and k (1≤k≤109).
Output
For each test case print the k-th positive integer that is not divisible by n.
Example
input
6
3 7
4 12
2 1000000000
7 97
1000000000 1000000000
2 1
output
10
15
1999999999
113
1000000001
1
题目大意
给定两个数n、k,求第k个不能被n整除的数是多少。
题目分析
首先,我们来想想,从1开始的第k个数本来是k,但因为中间的某一些数不能取,所以答案为k+某个数。我们要求的就是这个数。
以第二组数据为例:
4 12
1,2,3|5,6,7|9,10,11|13,14,15
第12个数是15。前12个数有3个|,所以是12+3=15。所以这个数即为分割线的数量。
分割线的数量不好求,我们可以先求出组数:
因为每组有(n-1)个数,所以组数为k/(n-1)上取整,而分割线的数量即为组数-1,因此答案即为(k+n-1)/(n-1)-1。这个数可以简化为(k-1)/(n-1)。
代码如下
#include <iostream>
#include <cstdio>
#include <cmath>
#include <string>
#include <cstring>
#include <map>
#include <queue>
#include <vector>
#include <set>
#include <algorithm>
#include <iomanip>
#define LL long long
using namespace std;
int const N=1e5+5;
int main()
{
int t;
cin>>t;
while(t--)
{
int n,k;
cin>>n>>k;
cout<<k+(k-1)/(n-1)<<endl;
}
return 0;
}
 Spatial Localization and Detection(classification and localization)")
(Review cs231n) Spatial Localization and Detection(classification and localization)
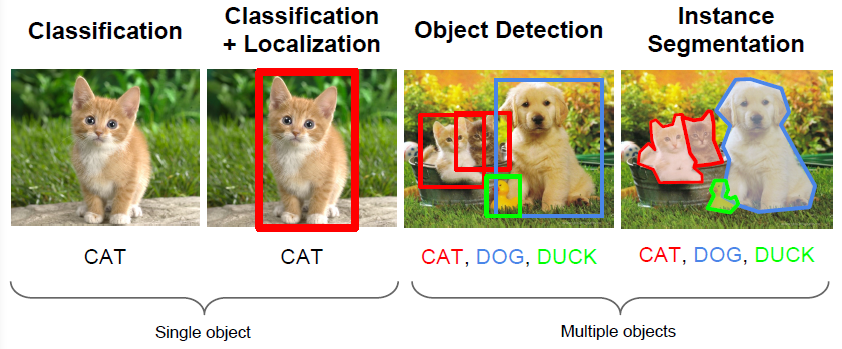 重在图像的定位和检测的内容。
重在图像的定位和检测的内容。
一张图片中只有一种给定类别标签的对象,定位则是图像中有对象框;再这些类中,每一个训练目标都有一个类和许多的图像内部对应类的位置选框。
猜想的仅是类标签,不如说它们是位置选框。正确的位置选框,代表你的结果很接近分割的准确率。
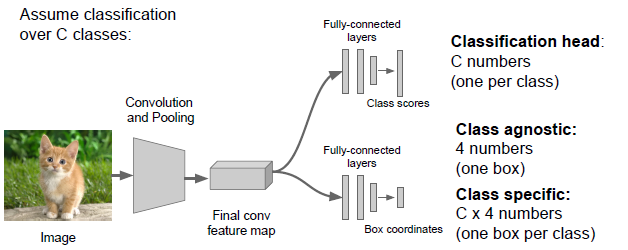
研究定位的简单有用基础的范式,就是回归。
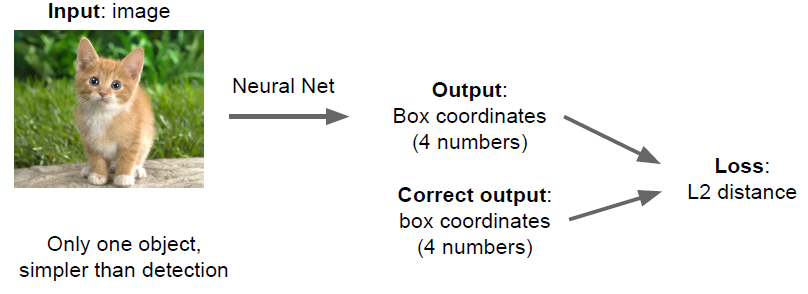
这张图片经过一系列的处理过程,最终生成四个代表选框大小的实数,有很多不同的参数来描述选框,人们常用的是用 XY 坐标定位选框的左上角
、宽度和高度,还有一些 ground truth(真实准确的选框),计算欧式损失。
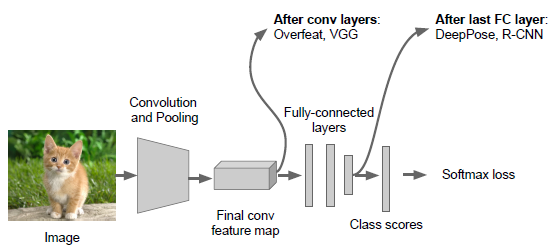
训练流程:
1. 用 ground truth 边框对许多批样本进行抽样,and forward
2.get the loss between the predicted results and ground truth. and carry out the backward
3.download the trained models like VGG、AlexNet. and get the FC layers of class scores
4. 现在在这个网络里再接上一些新的全连接层,称为回归网络 (regression head),输出的是一些实数。
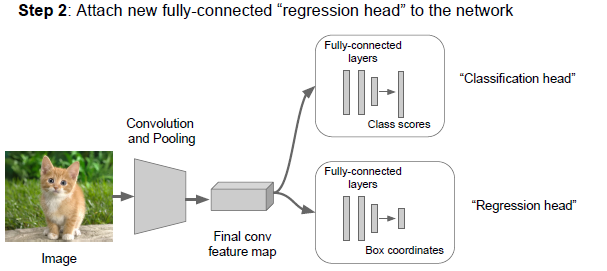
5. 训练这一个回归网络像训练分类网络一样,唯一的区别就是 class scores 和 class 的损失替换成了 L2 loss 和
ground true 选框。

6. finally get the classification network and the regression network
Detail note:在进行回归时一共有两种主要方式,不定类回归 (class-logostic regress) :全连接层都使用相同的结构和权值来得到边界框 (bounding box)
and 特定类回归(class- specific regress) :输出的是 C * 4 个数字,相当于每种类别有一个边界框。
两种回归的 Discussion: 对一只猫和对火车确定边界总是有一些不同,你需要网络中有不同的处理来应对这个问题,
它稍微改变了计算损失的方式,它不仅仅是使用 ground truth class 来计算损失。
网络在哪一个位置进行回归?
我们可以用这个框架对不止一种物体来划定边界框,输入一张图片,你需要提前知道固定数量的物体进行划定边界框,回归层
输出对于每个物体的边界框,同样训练。
应用于人类姿势判别:需要去找到人类的特定的关节,能够在 XY 轴上找每个关节的位置,从而让我们对这个人的姿势进行预测。
Idea 2: sliding window
思路:和之前的方法相比不只是运行一次,而是在不同的位置多次进行,再将不同的位置进行聚合。
Overfeat 的结构:
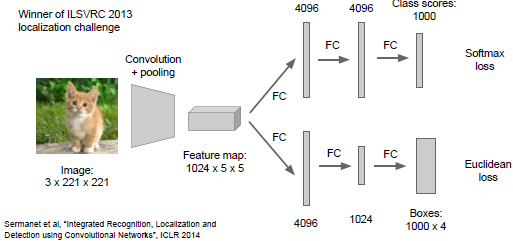
过程:输入图片,在图片左上方进行分类和定位,进而得到类的分数和相应的边界框。重复这个操作,使用相同的分类和
定位网络,在这个图片的四个角落都运行一次,最终得到四个边界框,对于每个位置都有一个边界框和类的分数,并使用一些方法对边界框和分数进行合并,组合和据集不同位置的边界框可以帮助这个模型进行错误修正。
1. 在实际操作中要使用远对于四个的边界框;
2. 进行回归时,输出的是表示边界框的四个数字,这个数字理论上可能出现在任何地方,他不一定在图片内部,当你在用
sliding window 方法进行训练的时候,你对不同位置进行操作时坐标轴为进行一些改变,事实上,它们选取的位置对于四种.
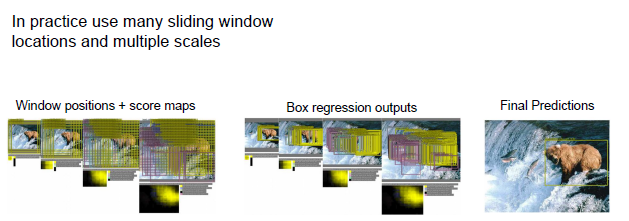
Discussion: 高效的方法; 网络通常包含卷积网络和全连接网络,一个全连接网络由 4096 个数字构成,是一个 vector,如果不把他看成一个 vector, 而将他看成另一个卷积的特征映射,这个方法是将全连接层转换成了卷积层,我们得到一个卷积特征映射;考虑通过一个 5*5 的卷积层,而不是特征特征映射。之后将全连接层转换为 1*1 的卷积。
我们使用了卷积运算替换了原先的全连接层,优势:网络只由卷积层和池化层的元素构成了,我们就可以使用不同尺寸的图片来运行网络,就可以处理不同尺寸的图片了,在不同大小的图片上使用相同的计算过程。
Discussion:
1、ResNet 使用了另外一种定位算法叫 RPN(region proposal network)
2、在 L2 损失值有一个极端值时,是很不好的,所以人们一般不用 L2,也可以使用 L1 损失值,帮助解决极端值的问题,用一个平滑 L1 函数(Huber 损失),看起来和普通的 L1 差不多,但在接近 0 的时候更像二次函数,但是里面有噪声的话就不会那么有效。
3. 不要选取非反向传播的网络;
4. 因为在测试环节,你用的类和训练环节一样,在训练中也需要测试,我们不要求去做不同类之间的泛化,这太难了。
5. 实际上人们有时候使用同一个网络,同时训练;有时候人们会分开,用一个网络训练回归,用另一个网络训练分类,两种都可以。

2018C Version CAT Caterpillar ET Diagnostic Adapter III PLUS DELLd630 laptop (Real Caterpillar ET...
We will install the software before ship, so you can get it work directly after you receive it.
Note:
Some new vehicles require a 14PIN diagnostic cable to do diagnostic. If you need to diagnose the latest model, please purchase the 14PIN cable.
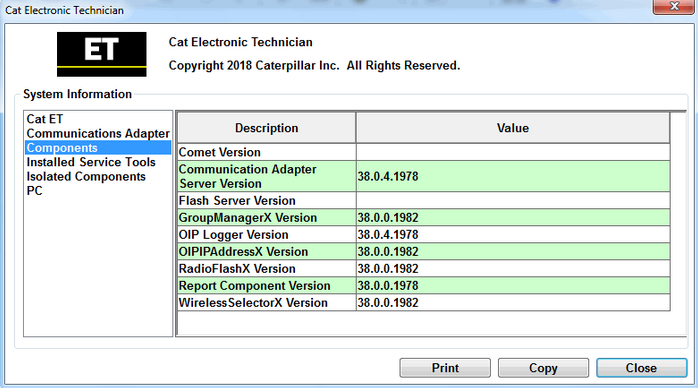
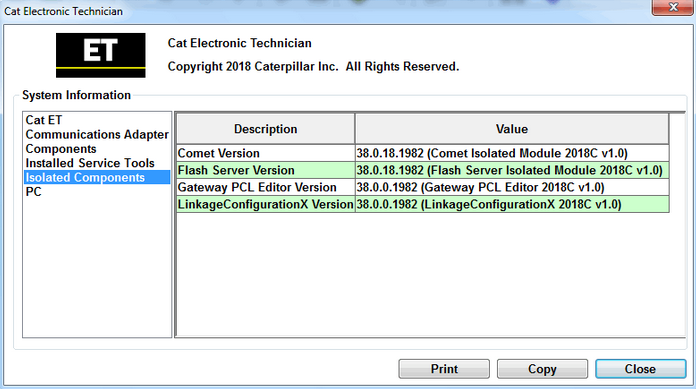
2018C Cat ET software as Cat Caterpillar ET 2018A Software update version, 2018C Caterpillar Electronic Technician softwarer With CAT ET 3 Cat caterpillar adapter 3 support caterpillar diagnostic till 2018.

Cat et Caterpillar Electronic Technician Software 2018C V1.0:
Type of catalogue: Caterpillar Electronic Technician Diagnostic Software
Make: Caterpillar
Region: WorldWide all region
Inclusive languages: English, Chinese, Danish, French, German, Italian, Japanese, Portuguese, Russian, Spanish
Caterpillar ET Software 2018C Function:
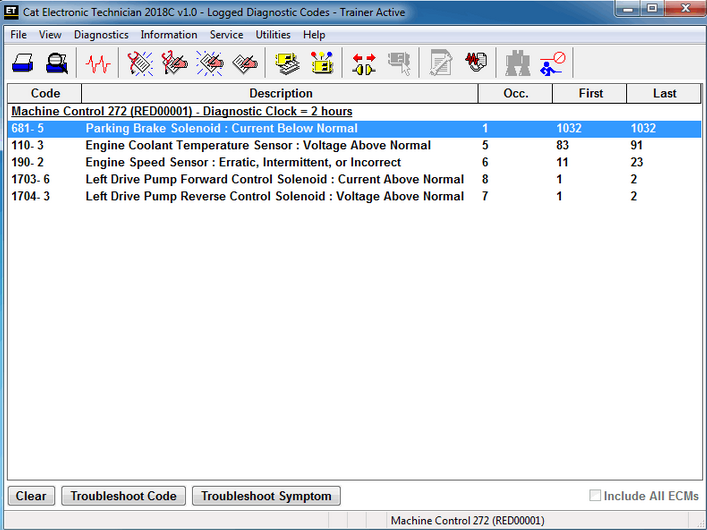
This diagnostic app allows you to:
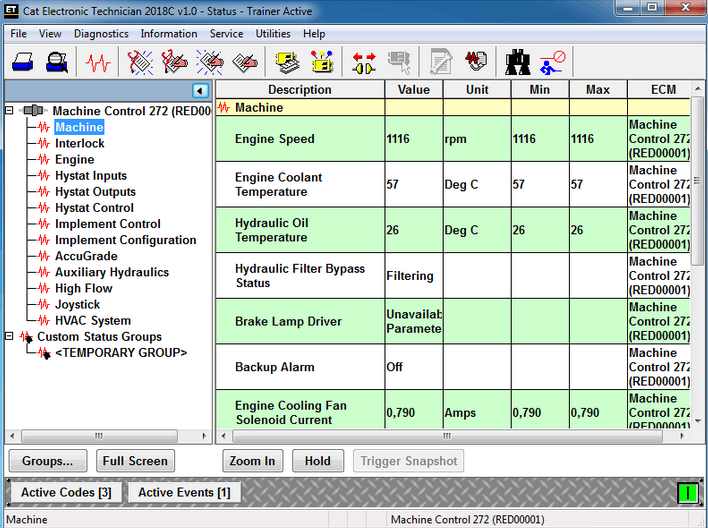
View active and logged diagnostics.
View events where irregularities occurred and were logged by the ECM.
View the status of a group of parameters (temperatures, pressures, etc.) simultaneously.
Record and log performance data.
Graph a group of status parameters.
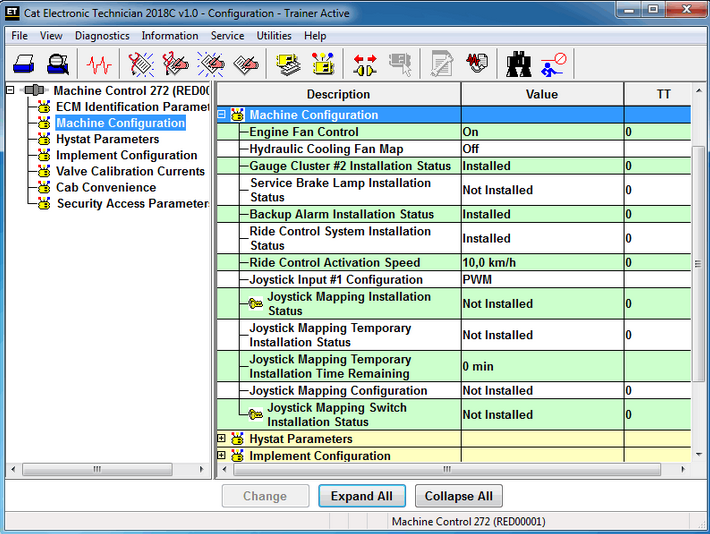
View the current configuration of an ECM.
Change ECM configurations.
Perform diagnostic tests.
Perform calibrations.
Print reports and diagnostic results.
Please keep in mind that some ecm settings for example, speed limit requires factory password. The factory password generator is not included in this application
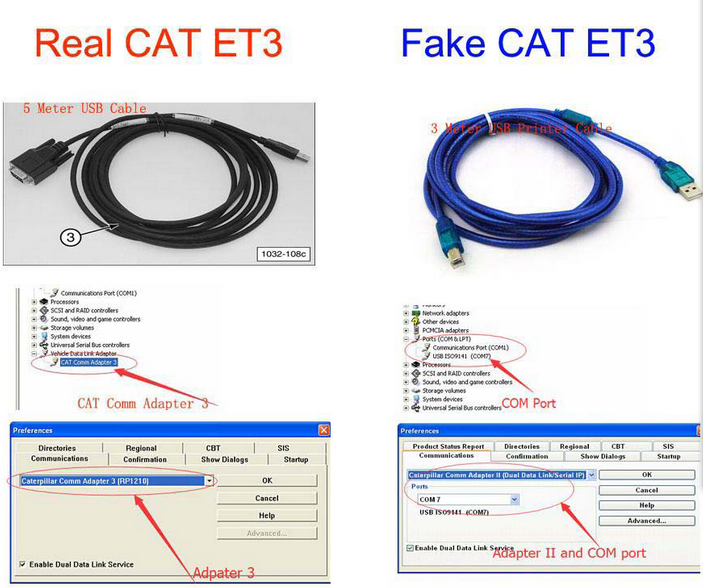
Original Factory Caterpillar ET3 Adapter III Compare With OEM Caterpillar ET Diagnostic Adpater III
1. Original Factory CAT ET can use once pluged, no need install the USB drive, the software can automatic realize it for ET3 Adapter, and the machine can automatic weld the high quality Circuit board, quality will be more reliable.
2. The OEM Heavy Duty Diagnostic Caterpillar ET Diagnostic Adapter III need use USB Drive to install, and need choose the COM Port, and in the software ET also need choose ET2 then can be used.
Package 1 :
1.Used Dell D630 laptop
2.Real CAT et3 Comm Adapter III(it’s best quality cat et 3,not adapter 2,please check Communication port)
3.USB Cable (From device to your computer)
4.J1939/J1708 9PIN Cable (from device to your truck)
5.6PIN Cable (for old truck)

Package 2:
1.Used Dell D630 laptop
2.Real CAT et3 Comm Adapter III(it’s best quality cat et 3,not adapter 2,please check Communication port)
3.USB Cable (From device to your computer)
4.J1939/J1708 9PIN Cable (from device to your truck)
5.6PIN Cable (for old truck)
6.14PIN Cable(for new truck,optional)




 eTPU Functions – Application Note")
AN3769: Using the Engine Position (CRANK and CAM) eTPU Functions – Application Note
 点击获取完整资源:AN3769: Using the Engine Position (CRANK and CAM) eTPU Functions – Application Note
点击获取完整资源:AN3769: Using the Engine Position (CRANK and CAM) eTPU Functions – Application Note
Describing the simple C interface functions to CRANK and CAM eTPU functions. These functions can be used on any product that has an eTPU module. Example code is available for the MPC5633M device.
点击获取完整资源:AN3769: Using the Engine Position (CRANK and CAM) eTPU Functions – Application Note
我们今天的关于CF 1100C NN and the Optical Illusion和数学的分享已经告一段落,感谢您的关注,如果您想了解更多关于#640(Div.4)C. K-th Not Divisible by n(数学)、(Review cs231n) Spatial Localization and Detection(classification and localization)、2018C Version CAT Caterpillar ET Diagnostic Adapter III PLUS DELLd630 laptop (Real Caterpillar ET...、AN3769: Using the Engine Position (CRANK and CAM) eTPU Functions – Application Note的相关信息,请在本站查询。
本文标签:




